 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Neural Radiance Field (NeRF) 3D Analysis of Camera Poses from HoloLens Trajectories and Structure from Motion
Apr 20, 2023



Neural Radiance Fields (NeRFs) are trained using a set of camera poses and associated images as input to estimate density and color values for each position. The position-dependent density learning is of particular interest for photogrammetry, enabling 3D reconstruction by querying and filtering the NeRF coordinate system based on the object density. While traditional methods like Structure from Motion are commonly used for camera pose calculation in pre-processing for NeRFs, the HoloLens offers an interesting interface for extracting the required input data directly. We present a workflow for high-resolution 3D reconstructions almost directly from HoloLens data using NeRFs. Thereby, different investigations are considered: Internal camera poses from the HoloLens trajectory via a server application, and external camera poses from Structure from Motion, both with an enhanced variant applied through pose refinement. Results show that the internal camera poses lead to NeRF convergence with a PSNR of 25\,dB with a simple rotation around the x-axis and enable a 3D reconstruction. Pose refinement enables comparable quality compared to external camera poses, resulting in improved training process with a PSNR of 27\,dB and a better 3D reconstruction. Overall, NeRF reconstructions outperform the conventional photogrammetric dense reconstruction using Multi-View Stereo in terms of completeness and level of detail.
Pose Normalization of Indoor Mapping Datasets Partially Compliant to the Manhattan World Assumption
Jul 16, 2021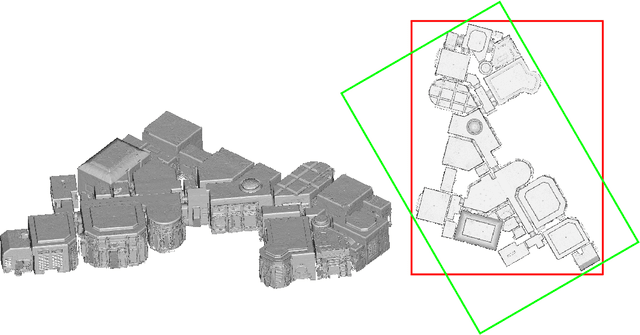
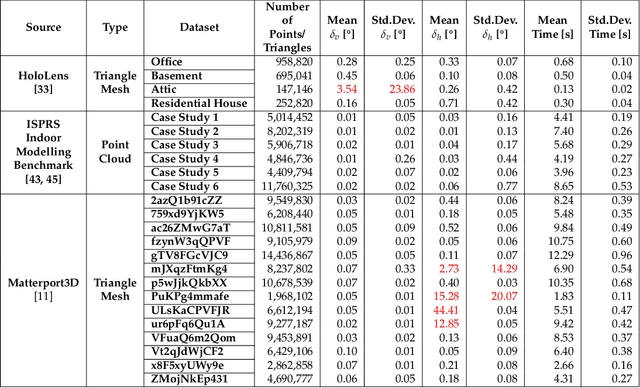
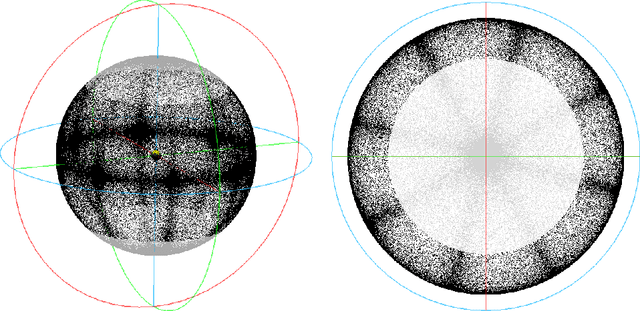
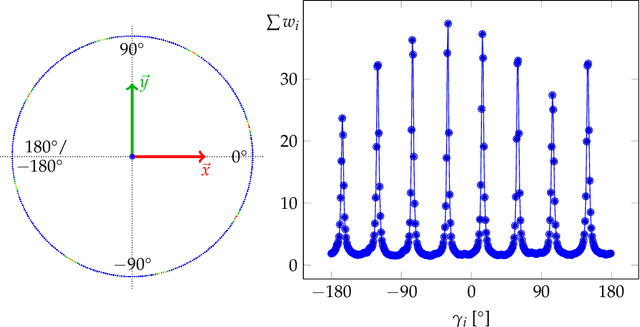
In this paper, we present a novel pose normalization method for indoor mapping point clouds and triangle meshes that is robust against large fractions of the indoor mapping geometries deviating from an ideal Manhattan World structure. In the case of building structures that contain multiple Manhattan World systems, the dominant Manhattan World structure supported by the largest fraction of geometries is determined and used for alignment. In a first step, a vertical alignment orienting a chosen axis to be orthogonal to horizontal floor and ceiling surfaces is conducted. Subsequently, a rotation around the resulting vertical axis is determined that aligns the dataset horizontally with the coordinate axes. The proposed method is evaluated quantitatively against several publicly available indoor mapping datasets. Our implementation of the proposed procedure along with code for reproducing the evaluation will be made available to the public upon acceptance for publication.