 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Camera-to-Robot Calibration Method for Vision-Based Floor Measurements
Mar 16, 2026A novel hand-eye calibration method for ground-observing mobile robots is proposed. While cameras on mobile robots are com- mon, they are rarely used for ground-observing measurement tasks. Laser trackers are increasingly used in robotics for precise localization. A referencing plate is designed to combine the two measurement modalities of laser-tracker 3D metrology and camera- based 2D imaging. It incorporates reflector nests for pose acquisition using a laser tracker and a camera calibration target that is observed by the robot-mounted camera. The procedure comprises estimating the plate pose, the plate-camera pose, and the robot pose, followed by computing the robot-camera transformation. Experiments indicate sub-millimeter repeatability.
Evaluation of Visual Place Recognition Methods for Image Pair Retrieval in 3D Vision and Robotics
Mar 14, 2026Visual Place Recognition (VPR) is a core component in computer vision, typically formulated as an image retrieval task for localization, mapping, and navigation. In this work, we instead study VPR as an image pair retrieval front-end for registration pipelines, where the goal is to find top-matching image pairs between two disjoint image sets for downstream tasks such as scene registration, SLAM, and Structure-from-Motion. We comparatively evaluate state-of-the-art VPR families - NetVLAD-style baselines, classification-based global descriptors (CosPlace, EigenPlaces), feature-mixing (MixVPR), and foundation-model-driven methods (AnyLoc, SALAD, MegaLoc) - on three challenging datasets: object-centric outdoor scenes (Tanks and Temples), indoor RGB-D scans (ScanNet-GS), and autonomous-driving sequences (KITTI). We show that modern global descriptor approaches are increasingly suitable as off-the-shelf image pair retrieval modules in challenging scenarios including perceptual aliasing and incomplete sequences, while exhibiting clear, domain-dependent strengths and weaknesses that are critical when choosing VPR components for robust mapping and registration.
Combining HoloLens with Instant-NeRFs: Advanced Real-Time 3D Mobile Mapping
May 03, 2023This work represents a large step into modern ways of fast 3D reconstruction based on RGB camera images. Utilizing a Microsoft HoloLens 2 as a multisensor platform that includes an RGB camera and an inertial measurement unit for SLAM-based camera-pose determination, we train a Neural Radiance Field (NeRF) as a neural scene representation in real-time with the acquired data from the HoloLens. The HoloLens is connected via Wifi to a high-performance PC that is responsible for the training and 3D reconstruction. After the data stream ends, the training is stopped and the 3D reconstruction is initiated, which extracts a point cloud of the scene. With our specialized inference algorithm, five million scene points can be extracted within 1 second. In addition, the point cloud also includes radiometry per point. Our method of 3D reconstruction outperforms grid point sampling with NeRFs by multiple orders of magnitude and can be regarded as a complete real-time 3D reconstruction method in a mobile mapping setup.
A Comparative Neural Radiance Field (NeRF) 3D Analysis of Camera Poses from HoloLens Trajectories and Structure from Motion
Apr 20, 2023



Neural Radiance Fields (NeRFs) are trained using a set of camera poses and associated images as input to estimate density and color values for each position. The position-dependent density learning is of particular interest for photogrammetry, enabling 3D reconstruction by querying and filtering the NeRF coordinate system based on the object density. While traditional methods like Structure from Motion are commonly used for camera pose calculation in pre-processing for NeRFs, the HoloLens offers an interesting interface for extracting the required input data directly. We present a workflow for high-resolution 3D reconstructions almost directly from HoloLens data using NeRFs. Thereby, different investigations are considered: Internal camera poses from the HoloLens trajectory via a server application, and external camera poses from Structure from Motion, both with an enhanced variant applied through pose refinement. Results show that the internal camera poses lead to NeRF convergence with a PSNR of 25\,dB with a simple rotation around the x-axis and enable a 3D reconstruction. Pose refinement enables comparable quality compared to external camera poses, resulting in improved training process with a PSNR of 27\,dB and a better 3D reconstruction. Overall, NeRF reconstructions outperform the conventional photogrammetric dense reconstruction using Multi-View Stereo in terms of completeness and level of detail.
Corrosion Detection for Industrial Objects: From Multi-Sensor System to 5D Feature Space
May 14, 2022
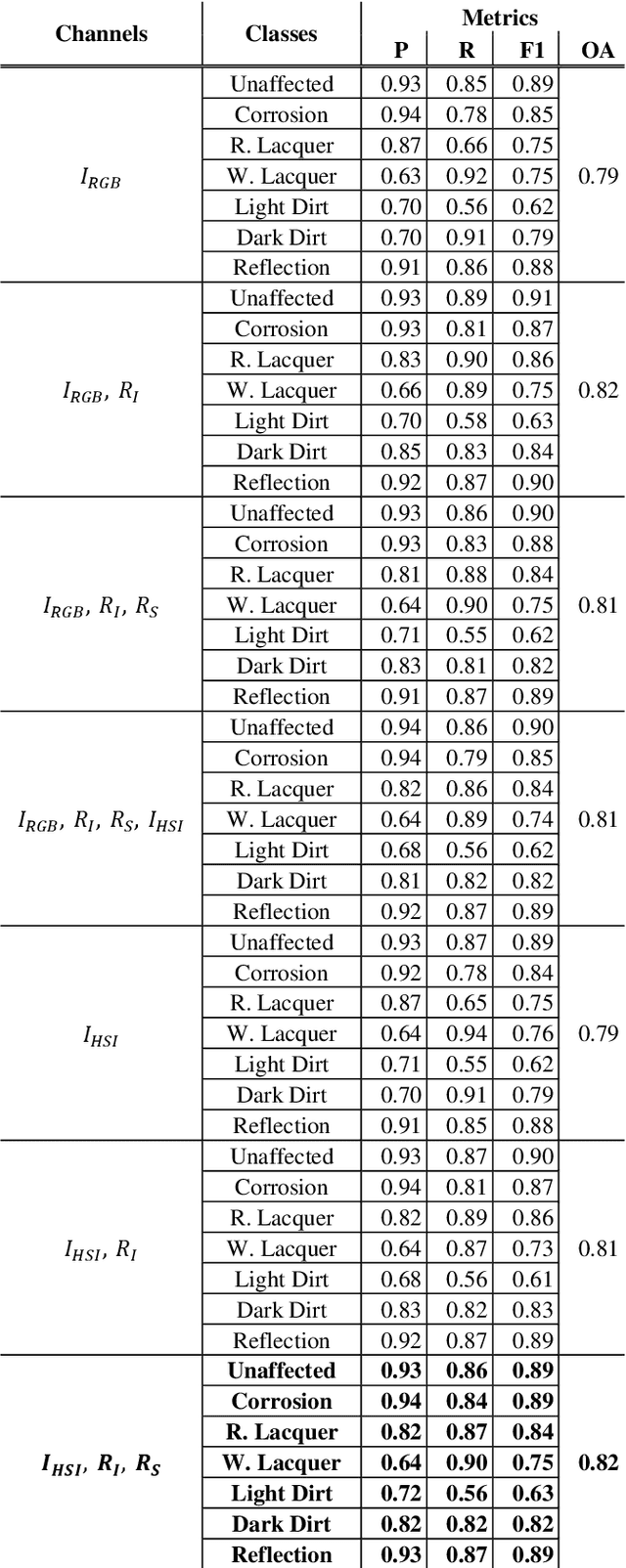
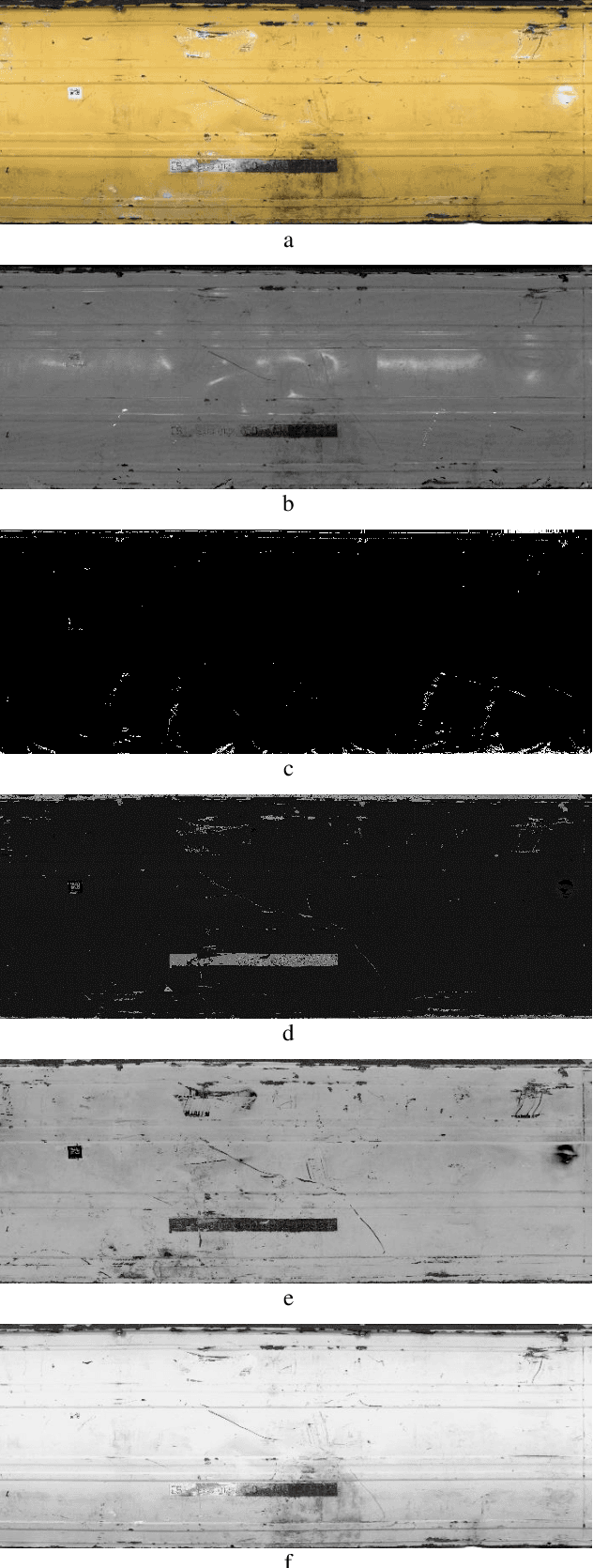

Corrosion is a form of damage that often appears on the surface of metal-made objects used in industrial applications. Those damages can be critical depending on the purpose of the used object. Optical-based testing systems provide a form of non-contact data acquisition, where the acquired data can then be used to analyse the surface of an object. In the field of industrial image processing, this is called surface inspection. We provide a testing setup consisting of a rotary table which rotates the object by 360 degrees, as well as industrial RGB cameras and laser triangulation sensors for the acquisition of 2D and 3D data as our multi-sensor system. These sensors acquire data while the object to be tested takes a full rotation. Further on, data augmentation is applied to prepare new data or enhance already acquired data. In order to evaluate the impact of a laser triangulation sensor for corrosion detection, one challenge is to at first fuse the data of both domains. After the data fusion process, 5 different channels can be utilized to create a 5D feature space. Besides the red, green and blue channels of the image (1-3), additional range data from the laser triangulation sensor is incorporated (4). As a fifth channel, said sensor provides additional intensity data (5). With a multi-channel image classification, a 5D feature space will lead to slightly superior results opposed to a 3D feature space, composed of only the RGB channels of the image.