 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Objects into Monocular SLAM: Line Based Category Specific Models
May 12, 2019


We propose a novel Line based parameterization for category specific CAD models. The proposed parameterization associates 3D category-specific CAD model and object under consideration using a dictionary based RANSAC method that uses object Viewpoints as prior and edges detected in the respective intensity image of the scene. The association problem is posed as a classical Geometry problem rather than being dataset driven, thus saving the time and labour that one invests in annotating dataset to train Keypoint Network for different category objects. Besides eliminating the need of dataset preparation, the approach also speeds up the entire process as this method processes the image only once for all objects, thus eliminating the need of invoking the network for every object in an image across all images. A 3D-2D edge association module followed by a resection algorithm for lines is used to recover object poses. The formulation optimizes for shape and pose of the object, thus aiding in recovering object 3D structure more accurately. Finally, a Factor Graph formulation is used to combine object poses with camera odometry to formulate a SLAM problem.
Constructing Category-Specific Models for Monocular Object-SLAM
Feb 26, 2018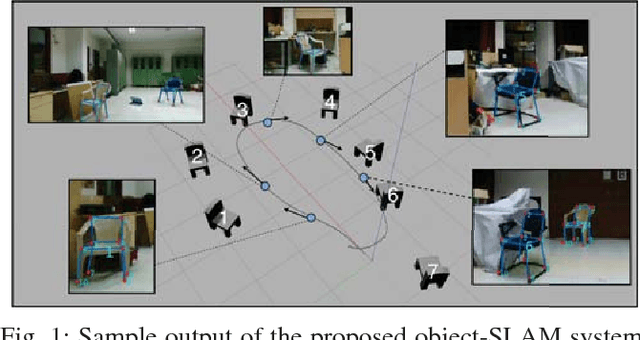
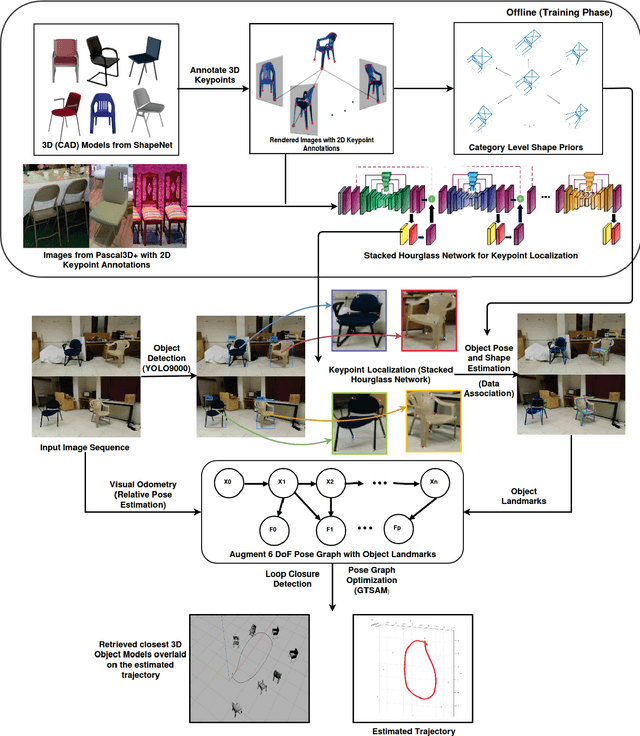

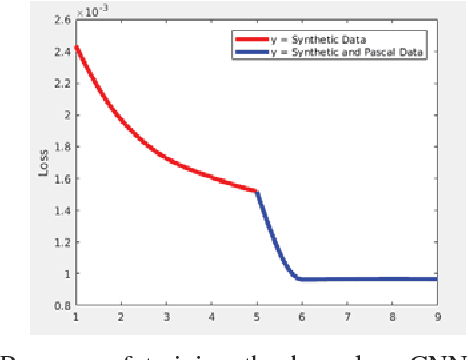
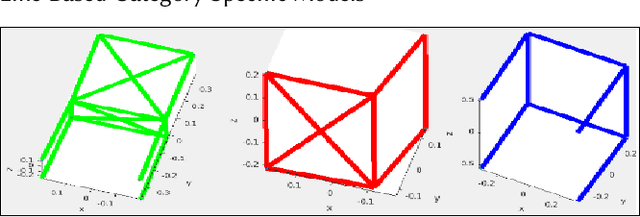
We present a new paradigm for real-time object-oriented SLAM with a monocular camera. Contrary to previous approaches, that rely on object-level models, we construct category-level models from CAD collections which are now widely available. To alleviate the need for huge amounts of labeled data, we develop a rendering pipeline that enables synthesis of large datasets from a limited amount of manually labeled data. Using data thus synthesized, we learn category-level models for object deformations in 3D, as well as discriminative object features in 2D. These category models are instance-independent and aid in the design of object landmark observations that can be incorporated into a generic monocular SLAM framework. Where typical object-SLAM approaches usually solve only for object and camera poses, we also estimate object shape on-the-fly, allowing for a wide range of objects from the category to be present in the scene. Moreover, since our 2D object features are learned discriminatively, the proposed object-SLAM system succeeds in several scenarios where sparse feature-based monocular SLAM fails due to insufficient features or parallax. Also, the proposed category-models help in object instance retrieval, useful for Augmented Reality (AR) applications. We evaluate the proposed framework on multiple challenging real-world scenes and show --- to the best of our knowledge --- first results of an instance-independent monocular object-SLAM system and the benefits it enjoys over feature-based SLAM methods.