 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynergy-Based Hand Pose Sensing: Optimal Glove Design
Jun 04, 2012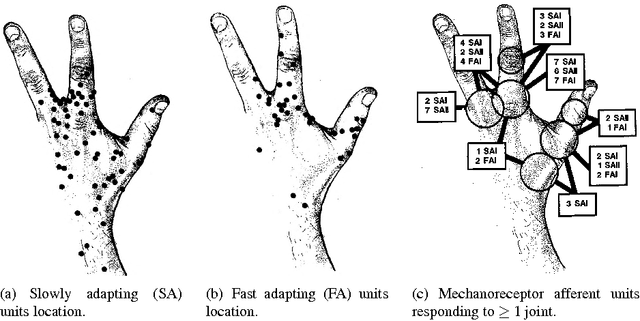
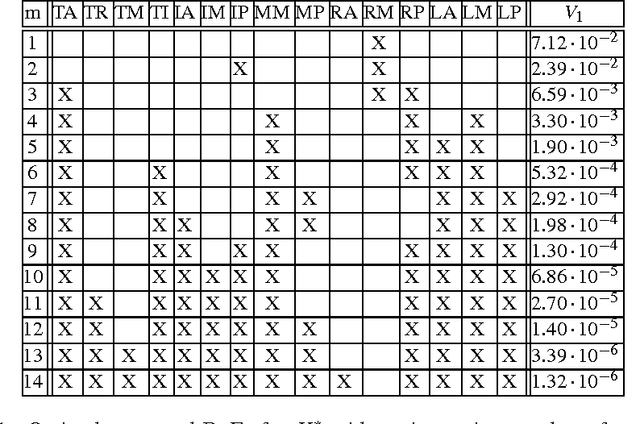
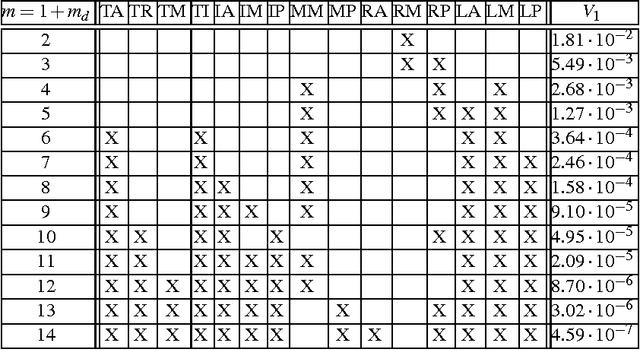
In this paper we study the problem of improving human hand pose sensing device performance by exploiting the knowledge on how humans most frequently use their hands in grasping tasks. In a companion paper we studied the problem of maximizing the reconstruction accuracy of the hand pose from partial and noisy data provided by any given pose sensing device (a sensorized "glove") taking into account statistical a priori information. In this paper we consider the dual problem of how to design pose sensing devices, i.e. how and where to place sensors on a glove, to get maximum information about the actual hand posture. We study the continuous case, whereas individual sensing elements in the glove measure a linear combination of joint angles, the discrete case, whereas each measure corresponds to a single joint angle, and the most general hybrid case, whereas both continuous and discrete sensing elements are available. The objective is to provide, for given a priori information and fixed number of measurements, the optimal design minimizing in average the reconstruction error. Solutions relying on the geometrical synergy definition as well as gradient flow-based techniques are provided. Simulations of reconstruction performance show the effectiveness of the proposed optimal design.
Synergy-based Hand Pose Sensing: Reconstruction Enhancement
Jun 04, 2012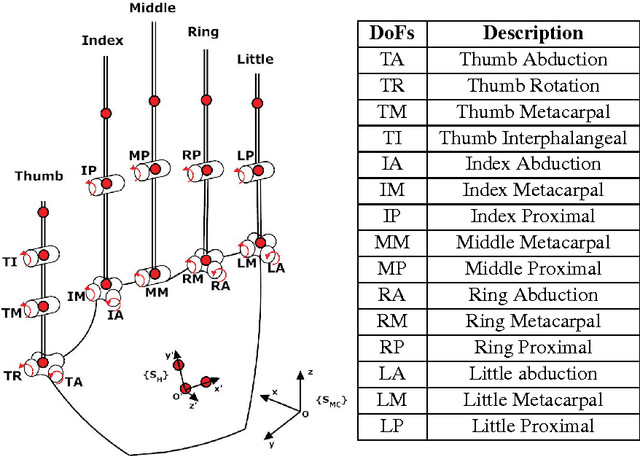
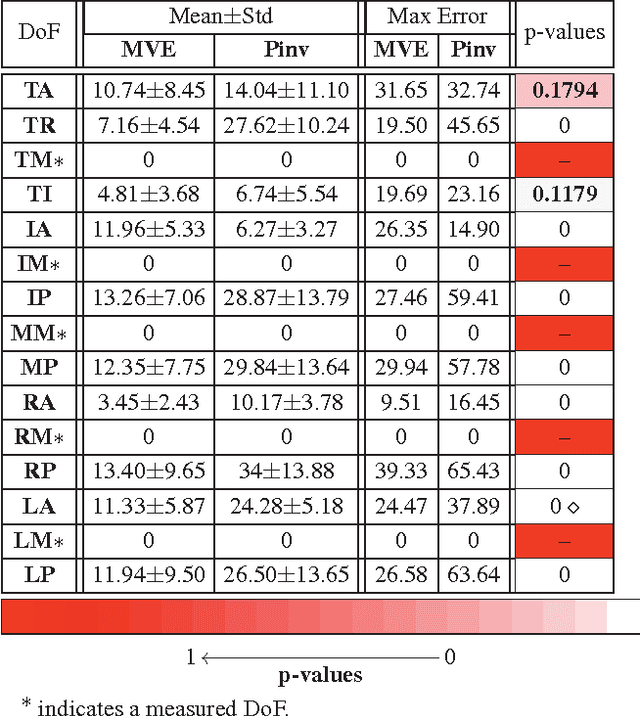
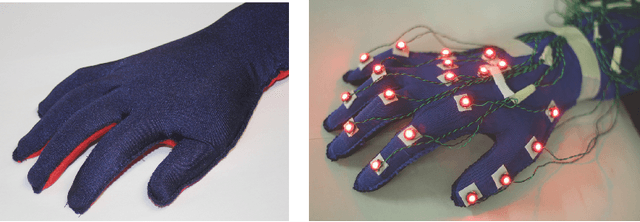
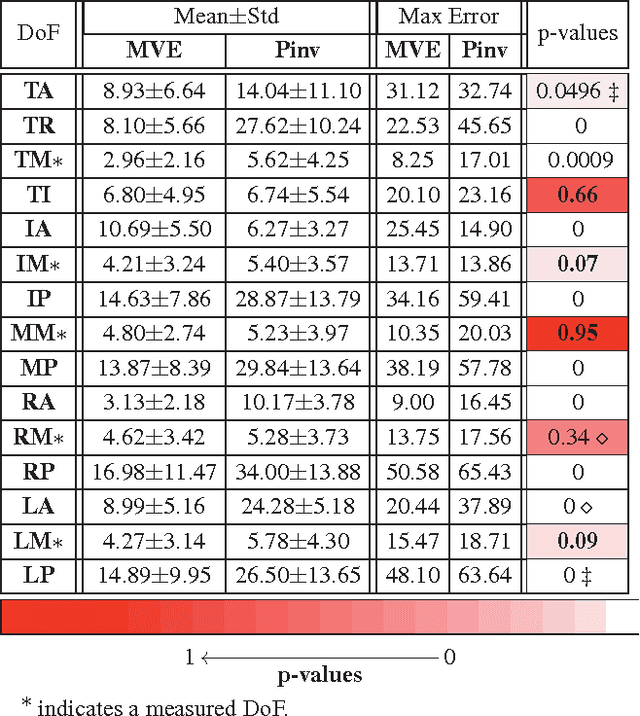
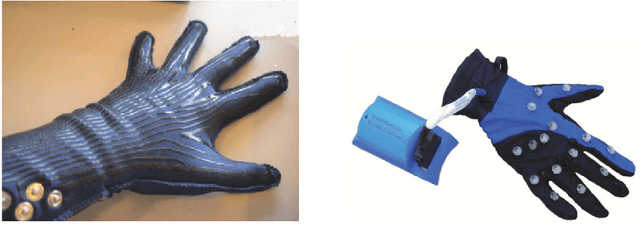
Low-cost sensing gloves for reconstruction posture provide measurements which are limited under several regards. They are generated through an imperfectly known model, are subject to noise, and may be less than the number of Degrees of Freedom (DoFs) of the hand. Under these conditions, direct reconstruction of the hand posture is an ill-posed problem, and performance can be very poor. This paper examines the problem of estimating the posture of a human hand using(low-cost) sensing gloves, and how to improve their performance by exploiting the knowledge on how humans most frequently use their hands. To increase the accuracy of pose reconstruction without modifying the glove hardware - hence basically at no extra cost - we propose to collect, organize, and exploit information on the probabilistic distribution of human hand poses in common tasks. We discuss how a database of such an a priori information can be built, represented in a hierarchy of correlation patterns or postural synergies, and fused with glove data in a consistent way, so as to provide a good hand pose reconstruction in spite of insufficient and inaccurate sensing data. Simulations and experiments on a low-cost glove are reported which demonstrate the effectiveness of the proposed techniques.
Optimal Synthesis for Nonholonomic Vehicles With Constrained Side Sensors
Feb 11, 2011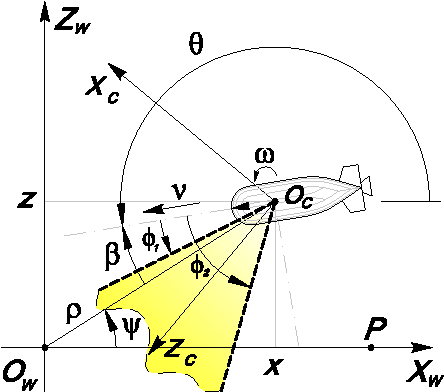
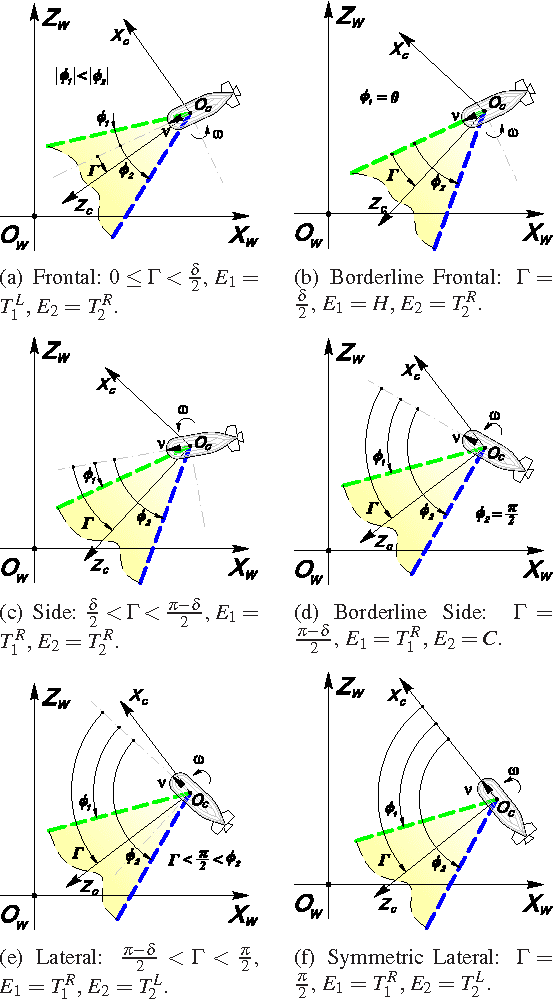
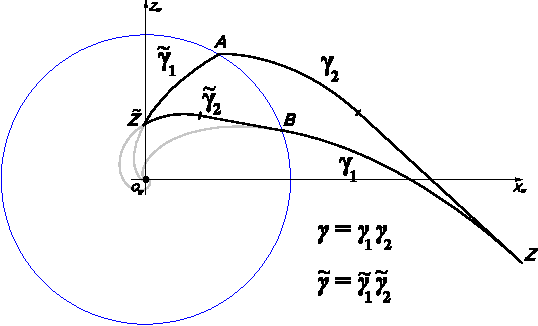
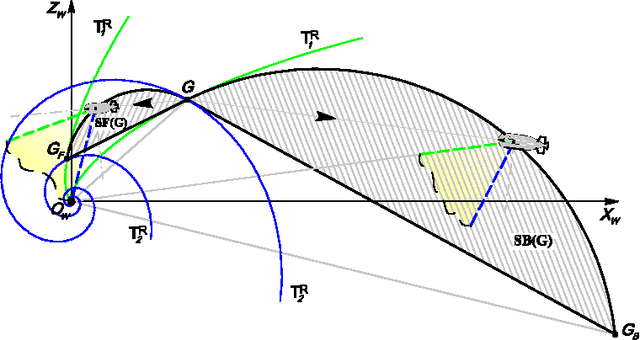
We present a complete characterization of shortest paths to a goal position for a vehicle with unicycle kinematics and a limited range sensor, constantly keeping a given landmark in sight. Previous work on this subject studied the optimal paths in case of a frontal, symmetrically limited Field--Of--View (FOV). In this paper we provide a generalization to the case of arbitrary FOVs, including the case that the direction of motion is not an axis of symmetry for the FOV, and even that it is not contained in the FOV. The provided solution is of particular relevance to applications using side-scanning, such as e.g. in underwater sonar-based surveying and navigation.