 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Synthesis for Nonholonomic Vehicles With Constrained Side Sensors
Feb 11, 2011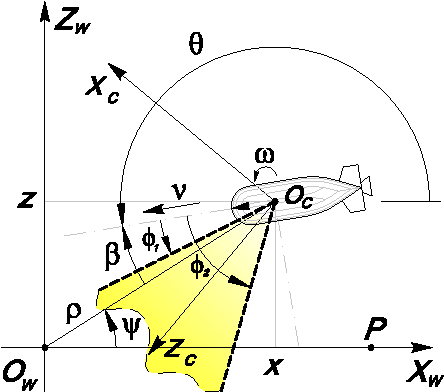
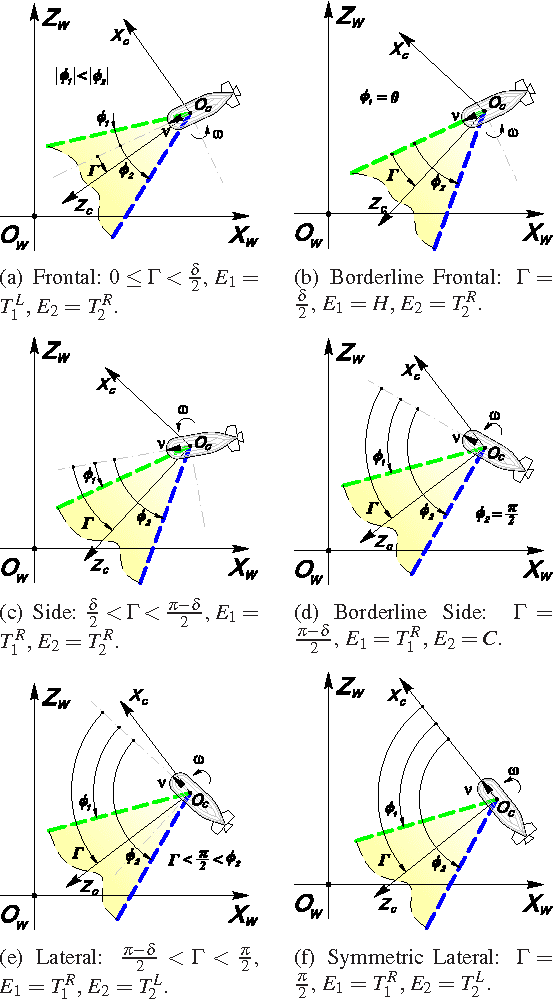
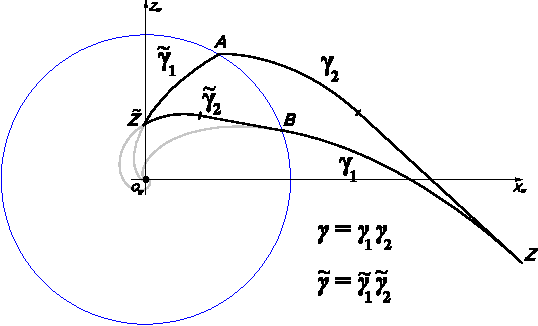
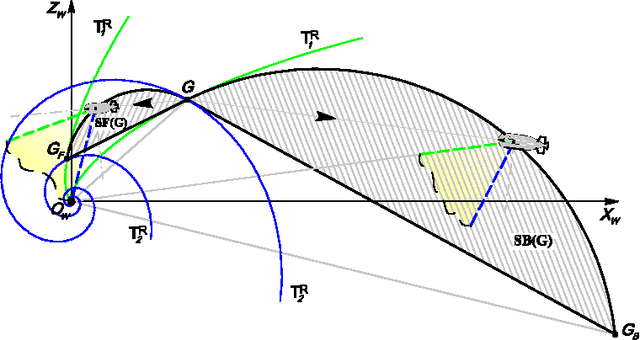
We present a complete characterization of shortest paths to a goal position for a vehicle with unicycle kinematics and a limited range sensor, constantly keeping a given landmark in sight. Previous work on this subject studied the optimal paths in case of a frontal, symmetrically limited Field--Of--View (FOV). In this paper we provide a generalization to the case of arbitrary FOVs, including the case that the direction of motion is not an axis of symmetry for the FOV, and even that it is not contained in the FOV. The provided solution is of particular relevance to applications using side-scanning, such as e.g. in underwater sonar-based surveying and navigation.
Distributed Collision-free Protocol for AGVs in Industrial Environments
Jan 12, 2011In this paper, we propose a decentralized coordina- tion algorithm for safe and efficient management of a group of mobile robots following predefined paths in a dynamic industrial environment. The proposed algorithm is based on a shared resources protocol and a replanning strategy. It is proved to guarantee ordered traffic flows avoiding collisions, deadlocks (stall situations) and livelock (agents move without reaching final destinations). Mutual access to resources has been proved for the proposed approach while condition on the maximum number of AGVs is given to ensure the absence of deadlocks during system evolutions. Finally conditions to verify a local livelocks will also be proposed. In consistency with the model of distributed robotic systems (DRS), no centralized mechanism, synchronized clock, shared memory or ground support is needed. A local inter-robot communication, based on sign-boards, is considered among a small number of spatially adjacent robotic units.