 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed and Proximity-Constrained C-Means for Discrete Coverage Control
Sep 16, 2017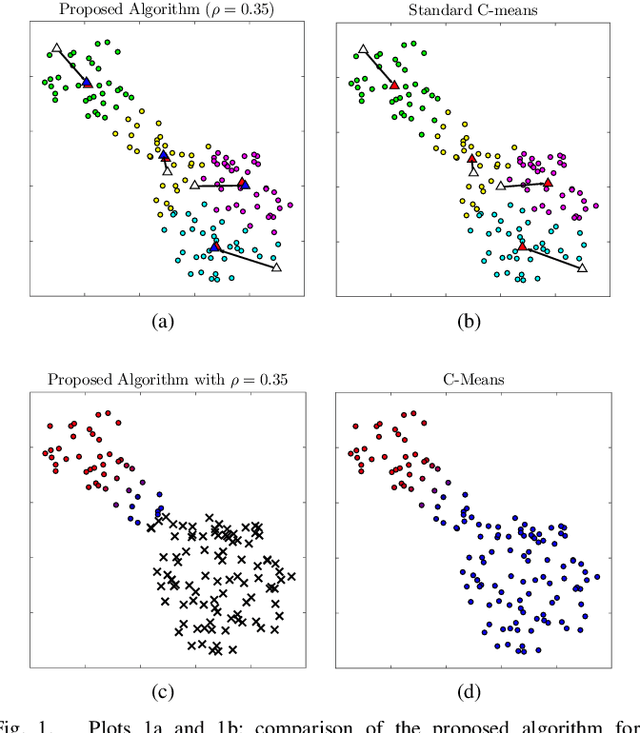
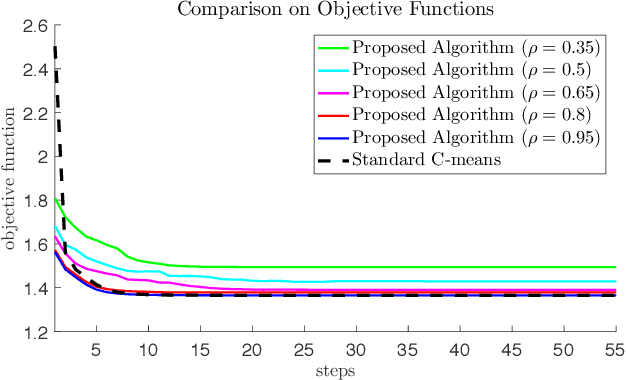
In this paper we present a novel distributed coverage control framework for a network of mobile agents, in charge of covering a finite set of points of interest (PoI), such as people in danger, geographically dispersed equipment or environmental landmarks. The proposed algorithm is inspired by C-Means, an unsupervised learning algorithm originally proposed for non-exclusive clustering and for identification of cluster centroids from a set of observations. To cope with the agents' limited sensing range and avoid infeasible coverage solutions, traditional C-Means needs to be enhanced with proximity constraints, ensuring that each agent takes into account only neighboring PoIs. The proposed coverage control framework provides useful information concerning the ranking or importance of the different PoIs to the agents, which can be exploited in further application-dependent data fusion processes, patrolling, or disaster relief applications.
ARIANNA: pAth Recognition for Indoor Assisted NavigatioN with Augmented perception
Dec 13, 2013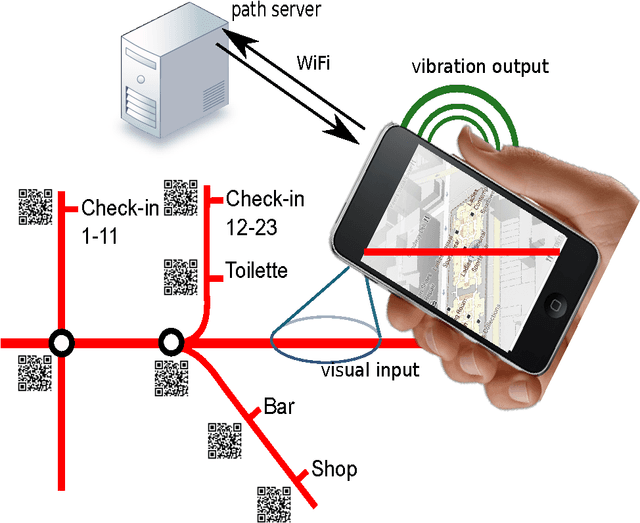
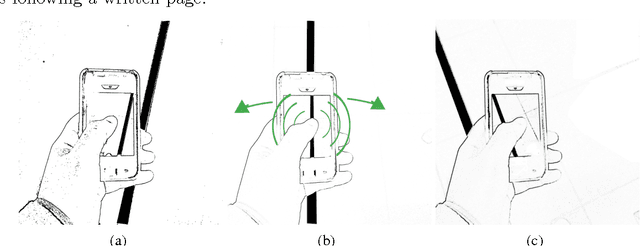

ARIANNA stands for pAth Recognition for Indoor Assisted Navigation with Augmented perception. It is a flexible and low cost navigation system for vi- sually impaired people. Arianna permits to navigate colored paths painted or sticked on the floor revealing their directions through vibrational feedback on commercial smartphones.
Distributed Consensus on Set-valued Information
Jan 12, 2011This paper focuses on the convergence of infor- mation in distributed systems of agents communicating over a network. The information on which the convergence is sought is not represented by real numbers, rather by sets of real numbers, whose possible dynamics are given by the class of so-called Boolean maps, involving only unions, intersections, and complements of sets. Based on a notion of contractivity, a necessary and sufficient condition ensuring the global and local convergence toward an equilibrium point is presented. In particular the analysis of global convergence recovers results already obtained by the authors, but the more general approach used in this paper allows analogue results to be found to characterize the local convergence.
Distributed Intrusion Detection for the Security of Societies of Robots
Jan 12, 2011This paper addresses the problem of detecting possible intruders in a group of autonomous robots, which coexist in a shared environment and interact with each other according to a set of "social behaviors", or common rules. Such rules specify what actions each robot is allowed to perform in the pursuit of its individual goals: rules are distributed, i.e. they can evaluated based only on the state of the individual robot, and on information that can be sensed directly or through communication with immediate neighbors. We consider intruders as robots which misbehave, i.e. do not follow the rules, because of either spontaneous failures or malicious reprogramming. Our goal is to detect intruders by observing the congruence of their behavior with the social rules as applied to the current state of the overall system. Moreover, in accordance with the fully distributed nature of the problem, the detection itself must be peformed by individual robots, based only on local information. The paper introduces a formalism that allows to model uniformly a large variety of possible robot societies. The main contribution consists in the proposal of an Intrusion Detection System, i.e. a protocol that, under suitabkle conditions, allows individual robots to detect possible misbehaving robots in their vicinity, and trigger possible further actions to secure the society. It is worth noting that the generality of the protocol formalism makes so that local monitors can be automatically generated once the cooperation rules and the robot dynamics are specified. The effectiveness of the proposed technique is shown through application to examples of automated robotic systems.
Logical Consensus for Distributed and Robust Intrusion Detection
Jan 12, 2011In this paper we introduce a novel consensus mech- anism where agents of a network are able to share logical values, or Booleans, representing their local opinions on e.g. the presence of an intruder or of a fire within an indoor environment. We first formulate the logical consensus problem, and then we review relevant results in the literature on cellular automata and convergence of finite-state iteration maps. Under suitable joint conditions on the visibility of agents and their communication capability, we provide an algorithm for generating a logical linear consensus system that is globally stable. The solution is optimal in terms of the number of messages to be exchanged and the time needed to reach a consensus. Moreover, to cope with possible sensor failure, we propose a second design approach that produces robust logical nonlinear consensus systems tolerating a given maximum number of faults. Finally, we show applicability of the agreement mechanism to a case study consisting of a distributed Intrusion Detection System (IDS).
Distributed Collision-free Protocol for AGVs in Industrial Environments
Jan 12, 2011In this paper, we propose a decentralized coordina- tion algorithm for safe and efficient management of a group of mobile robots following predefined paths in a dynamic industrial environment. The proposed algorithm is based on a shared resources protocol and a replanning strategy. It is proved to guarantee ordered traffic flows avoiding collisions, deadlocks (stall situations) and livelock (agents move without reaching final destinations). Mutual access to resources has been proved for the proposed approach while condition on the maximum number of AGVs is given to ensure the absence of deadlocks during system evolutions. Finally conditions to verify a local livelocks will also be proposed. In consistency with the model of distributed robotic systems (DRS), no centralized mechanism, synchronized clock, shared memory or ground support is needed. A local inter-robot communication, based on sign-boards, is considered among a small number of spatially adjacent robotic units.
Casting Robotic End-effectors To Reach Faraway Moving Objects
Jan 12, 2011In this article we address the problem of catching objects that move at a relatively large distance from the robot, of the order of tens of times the size of the robot itself. To this purpose, we adopt casting manipulation and visual-based feedback control. Casting manipulation is a technique to deploy a robotic end-effector far from the robot's base, by throwing the end-effector and controlling its ballistic flight using forces transmitted through a light tether connected to the end-effector itself. The tether cable can then be used to retrieve the end- effector to exert forces on the robot's environment. In previous work, planar casting manipulation was demon- strated to aptly catch static objects placed at a distant, known position, thus proving it suitable for applications such as sample acquisition and return, rescue, etc. In this paper we propose an extension of the idea to controlling the position of the end- effector to reach moving targets in 3D. The goal is achieved by an innovative design of the casting mechanism, and by closing a real-time control loop on casting manipulation using visual feedback of moving targets. To achieve this result, simplified yet accurate models of the system suitable for real-time computation are developed, along with a suitable visual feedback scheme for the flight phase. Effectiveness of the visual feedback controller is demonstrated through experiments with a 2D casting robot.