 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Average Consensus in Wireless Multi-Agent Systems with Over-the-Air Aggregation
Jul 30, 2025In this paper, we address the average consensus problem of multi-agent systems over wireless networks. We propose a distributed average consensus algorithm by invoking the concept of over-the-air aggregation, which exploits the signal superposition property of wireless multiple-access channels. The proposed algorithm deploys a modified version of the well-known Ratio Consensus algorithm with an additional normalization step for compensating for the arbitrary channel coefficients. We show that, when the noise level at the receivers is negligible, the algorithm converges asymptotically to the average for time-invariant and time-varying channels. Numerical simulations corroborate the validity of our results.
Distributed and Proximity-Constrained C-Means for Discrete Coverage Control
Sep 16, 2017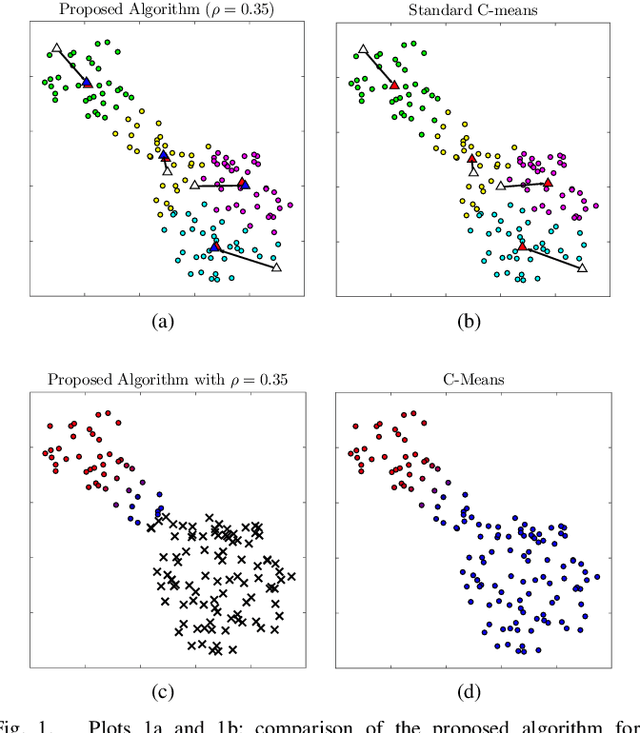
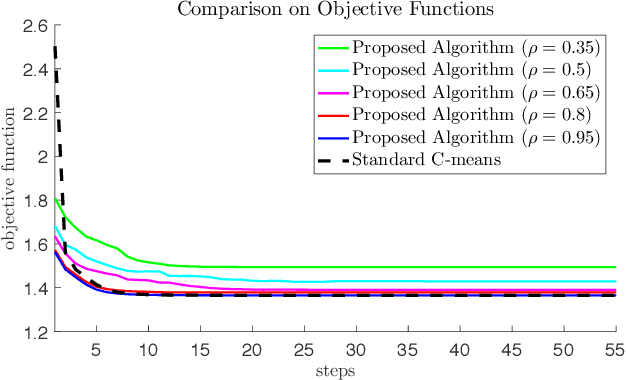
In this paper we present a novel distributed coverage control framework for a network of mobile agents, in charge of covering a finite set of points of interest (PoI), such as people in danger, geographically dispersed equipment or environmental landmarks. The proposed algorithm is inspired by C-Means, an unsupervised learning algorithm originally proposed for non-exclusive clustering and for identification of cluster centroids from a set of observations. To cope with the agents' limited sensing range and avoid infeasible coverage solutions, traditional C-Means needs to be enhanced with proximity constraints, ensuring that each agent takes into account only neighboring PoIs. The proposed coverage control framework provides useful information concerning the ranking or importance of the different PoIs to the agents, which can be exploited in further application-dependent data fusion processes, patrolling, or disaster relief applications.
Distributed k-means algorithm
Nov 10, 2014


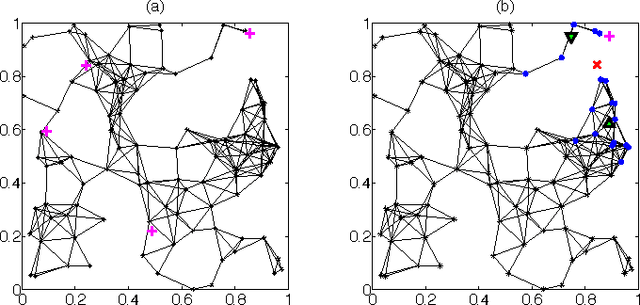
In this paper we provide a fully distributed implementation of the k-means clustering algorithm, intended for wireless sensor networks where each agent is endowed with a possibly high-dimensional observation (e.g., position, humidity, temperature, etc.) The proposed algorithm, by means of one-hop communication, partitions the agents into measure-dependent groups that have small in-group and large out-group "distances". Since the partitions may not have a relation with the topology of the network--members of the same clusters may not be spatially close--the algorithm is provided with a mechanism to compute the clusters'centroids even when the clusters are disconnected in several sub-clusters.The results of the proposed distributed algorithm coincide, in terms of minimization of the objective function, with the centralized k-means algorithm. Some numerical examples illustrate the capabilities of the proposed solution.