 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Wandering Behavior of People with Dementia
Oct 25, 2021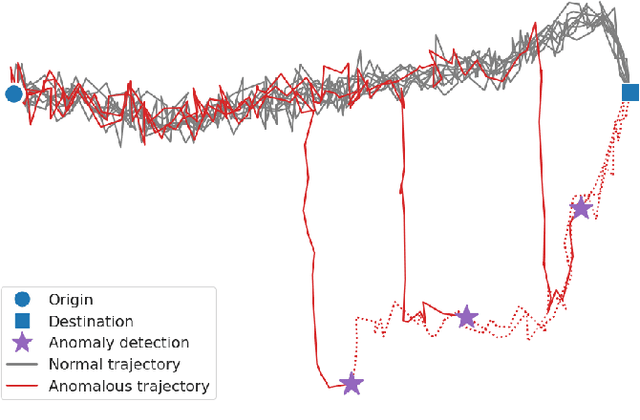
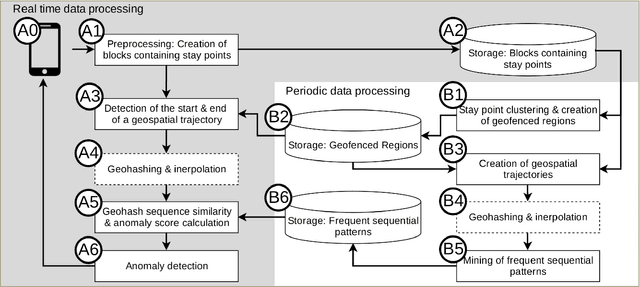
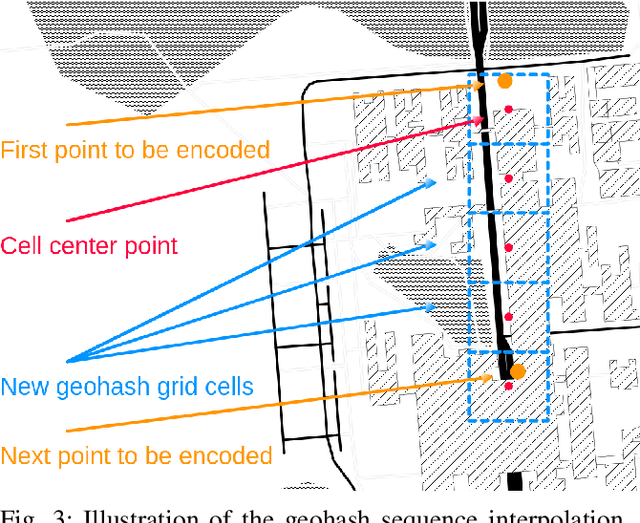

Wandering is a problematic behavior in people with dementia that can lead to dangerous situations. To alleviate this problem we design an approach for the real-time automatic detection of wandering leading to getting lost. The approach relies on GPS data to determine frequent locations between which movement occurs and a step that transforms GPS data into geohash sequences. Those can be used to find frequent and normal movement patterns in historical data to then be able to determine whether a new on-going sequence is anomalous. We conduct experiments on synthetic data to test the ability of the approach to find frequent locations and to compare it against an alternative, state-of-the-art approach. Our approach is able to identify frequent locations and to obtain good performance (up to AUC = 0.99 for certain parameter settings) outperforming the state-of-the-art approach.
Online Co-movement Pattern Prediction in Mobility Data
Feb 17, 2021



Predictive analytics over mobility data are of great importance since they can assist an analyst to predict events, such as collisions, encounters, traffic jams, etc. A typical example of such analytics is future location prediction, where the goal is to predict the future location of a moving object,given a look-ahead time. What is even more challenging is being able to accurately predict collective behavioural patterns of movement, such as co-movement patterns. In this paper, we provide an accurate solution to the problem of Online Prediction of Co-movement Patterns. In more detail, we split the original problem into two sub-problems, namely Future Location Prediction and Evolving Cluster Detection. Furthermore, in order to be able to calculate the accuracy of our solution, we propose a co-movement pattern similarity measure, which facilitates us to match the predicted clusters with the actual ones. Finally, the accuracy of our solution is demonstrated experimentally over a real dataset from the maritime domain.