 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-awareness in intelligent vehicles: Feature based dynamic Bayesian models for abnormality detection
Oct 29, 2020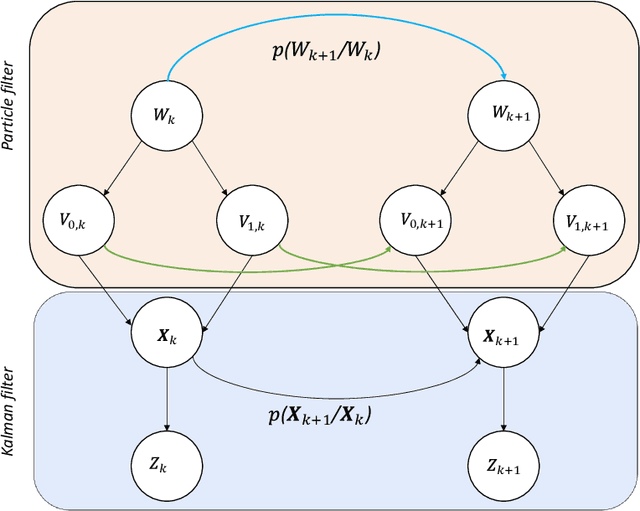
The evolution of Intelligent Transportation Systems in recent times necessitates the development of self-awareness in agents. Before the intensive use of Machine Learning, the detection of abnormalities was manually programmed by checking every variable and creating huge nested conditions that are very difficult to track. This paper aims to introduce a novel method to develop self-awareness in autonomous vehicles that mainly focuses on detecting abnormal situations around the considered agents. Multi-sensory time-series data from the vehicles are used to develop the data-driven Dynamic Bayesian Network (DBN) models used for future state prediction and the detection of dynamic abnormalities. Moreover, an initial level collective awareness model that can perform joint anomaly detection in co-operative tasks is proposed. The GNG algorithm learns the DBN models' discrete node variables; probabilistic transition links connect the node variables. A Markov Jump Particle Filter (MJPF) is applied to predict future states and detect when the vehicle is potentially misbehaving using learned DBNs as filter parameters. In this paper, datasets from real experiments of autonomous vehicles performing various tasks used to learn and test a set of switching DBN models.
Self-awareness in Intelligent Vehicles: Experience Based Abnormality Detection
Oct 28, 2020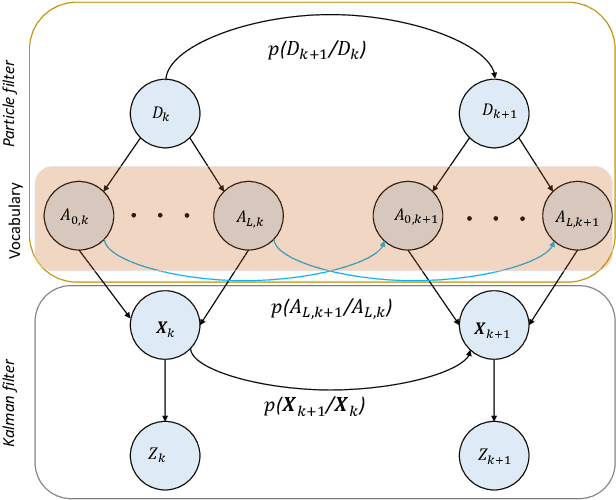
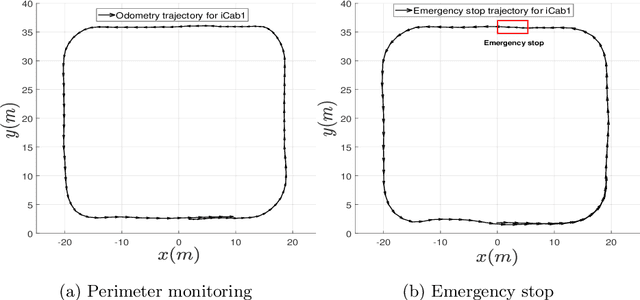
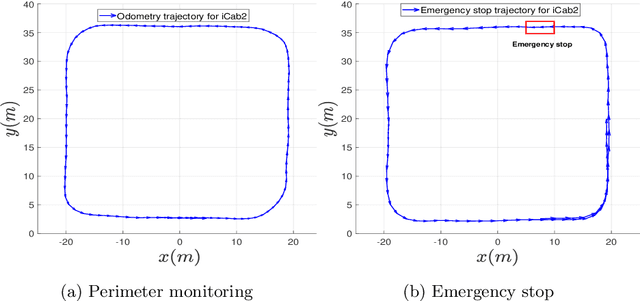
The evolution of Intelligent Transportation System in recent times necessitates the development of self-driving agents: the self-awareness consciousness. This paper aims to introduce a novel method to detect abnormalities based on internal cross-correlation parameters of the vehicle. Before the implementation of Machine Learning, the detection of abnormalities were manually programmed by checking every variable and creating huge nested conditions that are very difficult to track. Nowadays, it is possible to train a Dynamic Bayesian Network (DBN) model to automatically evaluate and detect when the vehicle is potentially misbehaving. In this paper, different scenarios have been set in order to train and test a switching DBN for Perimeter Monitoring Task using a semantic segmentation for the DBN model and Hellinger Distance metric for abnormality measurements.
Collective Awareness for Abnormality Detection in Connected Autonomous Vehicles
Oct 28, 2020

The advancements in connected and autonomous vehicles in these times demand the availability of tools providing the agents with the capability to be aware and predict their own states and context dynamics. This article presents a novel approach to develop an initial level of collective awareness in a network of intelligent agents. A specific collective self awareness functionality is considered, namely, agent centered detection of abnormal situations present in the environment around any agent in the network. Moreover, the agent should be capable of analyzing how such abnormalities can influence the future actions of each agent. Data driven dynamic Bayesian network (DBN) models learned from time series of sensory data recorded during the realization of tasks (agent network experiences) are here used for abnormality detection and prediction. A set of DBNs, each related to an agent, is used to allow the agents in the network to each synchronously aware possible abnormalities occurring when available models are used on a new instance of the task for which DBNs have been learned. A growing neural gas (GNG) algorithm is used to learn the node variables and conditional probabilities linking nodes in the DBN models; a Markov jump particle filter (MJPF) is employed for state estimation and abnormality detection in each agent using learned DBNs as filter parameters. Performance metrics are discussed to asses the algorithms reliability and accuracy. The impact is also evaluated by the communication channel used by the network to share the data sensed in a distributed way by each agent of the network. The IEEE 802.11p protocol standard has been considered for communication among agents. Real data sets are also used acquired by autonomous vehicles performing different tasks in a controlled environment.