 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-awareness in Intelligent Vehicles: Experience Based Abnormality Detection
Oct 28, 2020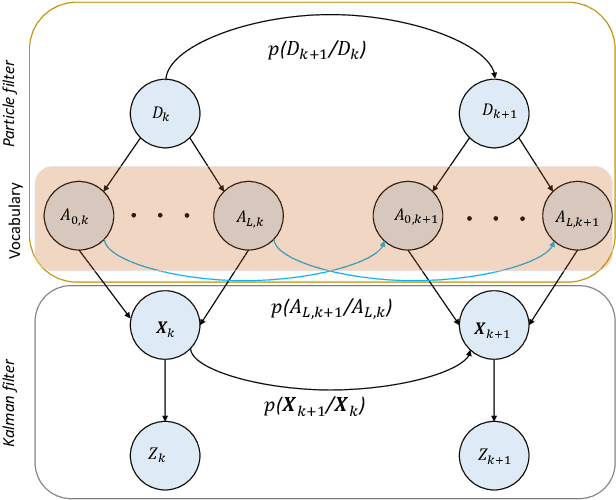
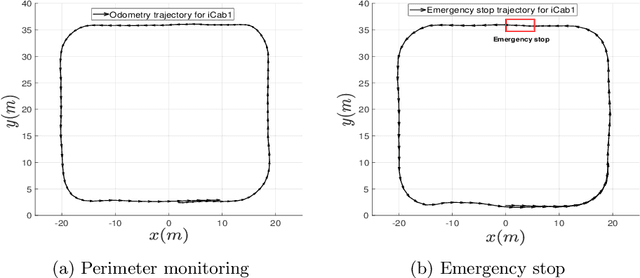
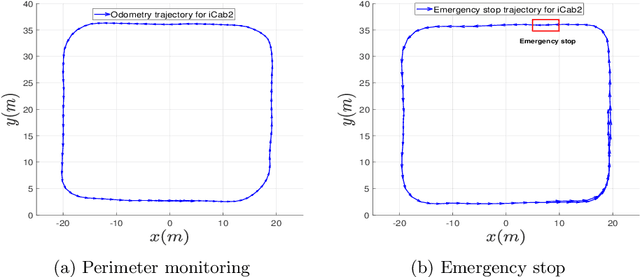
The evolution of Intelligent Transportation System in recent times necessitates the development of self-driving agents: the self-awareness consciousness. This paper aims to introduce a novel method to detect abnormalities based on internal cross-correlation parameters of the vehicle. Before the implementation of Machine Learning, the detection of abnormalities were manually programmed by checking every variable and creating huge nested conditions that are very difficult to track. Nowadays, it is possible to train a Dynamic Bayesian Network (DBN) model to automatically evaluate and detect when the vehicle is potentially misbehaving. In this paper, different scenarios have been set in order to train and test a switching DBN for Perimeter Monitoring Task using a semantic segmentation for the DBN model and Hellinger Distance metric for abnormality measurements.
Dynamic Bayesian Approach for decision-making in Ego-Things
Oct 28, 2020



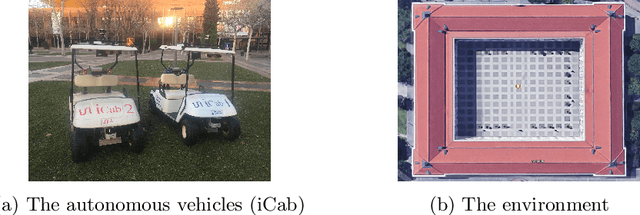
This paper presents a novel approach to detect abnormalities in dynamic systems based on multisensory data and feature selection. The proposed method produces multiple inference models by considering several features of the observed data. This work facilitates the obtainment of the most precise features for predicting future instances and detecting abnormalities. Growing neural gas (GNG) is employed for clustering multisensory data into a set of nodes that provide a semantic interpretation of data and define local linear models for prediction purposes. Our method uses a Markov Jump particle filter (MJPF) for state estimation and abnormality detection. The proposed method can be used for selecting the optimal set features to be shared in networking operations such that state prediction, decision-making, and abnormality detection processes are favored. This work is evaluated by using a real dataset consisting of a moving vehicle performing some tasks in a controlled environment.