 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollective Awareness for Abnormality Detection in Connected Autonomous Vehicles
Oct 28, 2020
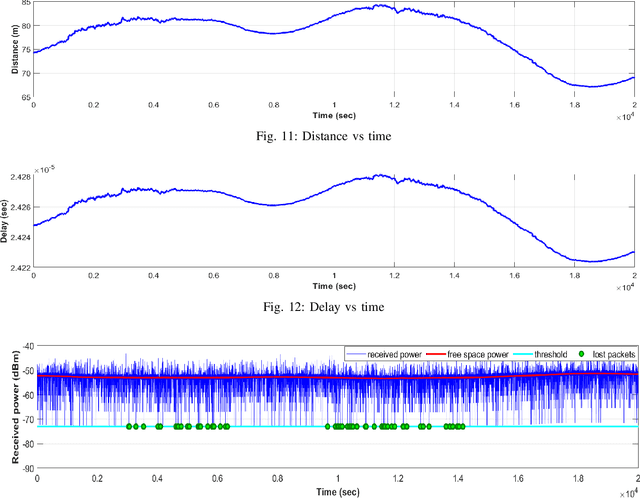

The advancements in connected and autonomous vehicles in these times demand the availability of tools providing the agents with the capability to be aware and predict their own states and context dynamics. This article presents a novel approach to develop an initial level of collective awareness in a network of intelligent agents. A specific collective self awareness functionality is considered, namely, agent centered detection of abnormal situations present in the environment around any agent in the network. Moreover, the agent should be capable of analyzing how such abnormalities can influence the future actions of each agent. Data driven dynamic Bayesian network (DBN) models learned from time series of sensory data recorded during the realization of tasks (agent network experiences) are here used for abnormality detection and prediction. A set of DBNs, each related to an agent, is used to allow the agents in the network to each synchronously aware possible abnormalities occurring when available models are used on a new instance of the task for which DBNs have been learned. A growing neural gas (GNG) algorithm is used to learn the node variables and conditional probabilities linking nodes in the DBN models; a Markov jump particle filter (MJPF) is employed for state estimation and abnormality detection in each agent using learned DBNs as filter parameters. Performance metrics are discussed to asses the algorithms reliability and accuracy. The impact is also evaluated by the communication channel used by the network to share the data sensed in a distributed way by each agent of the network. The IEEE 802.11p protocol standard has been considered for communication among agents. Real data sets are also used acquired by autonomous vehicles performing different tasks in a controlled environment.
Dynamic Bayesian Approach for decision-making in Ego-Things
Oct 28, 2020



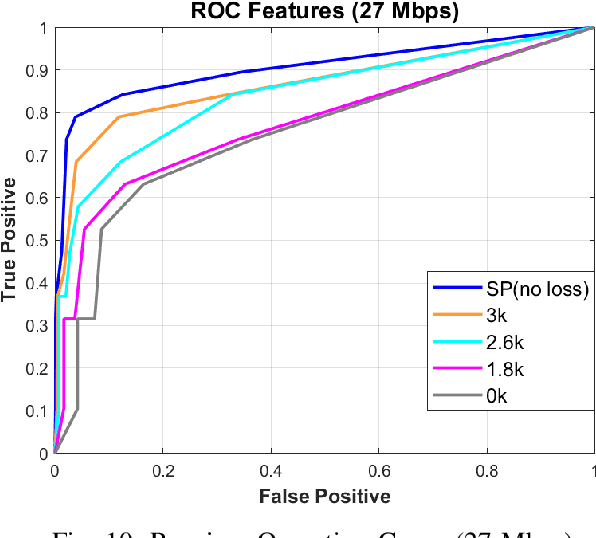
This paper presents a novel approach to detect abnormalities in dynamic systems based on multisensory data and feature selection. The proposed method produces multiple inference models by considering several features of the observed data. This work facilitates the obtainment of the most precise features for predicting future instances and detecting abnormalities. Growing neural gas (GNG) is employed for clustering multisensory data into a set of nodes that provide a semantic interpretation of data and define local linear models for prediction purposes. Our method uses a Markov Jump particle filter (MJPF) for state estimation and abnormality detection. The proposed method can be used for selecting the optimal set features to be shared in networking operations such that state prediction, decision-making, and abnormality detection processes are favored. This work is evaluated by using a real dataset consisting of a moving vehicle performing some tasks in a controlled environment.