 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConservative Exploration for Policy Optimization via Off-Policy Policy Evaluation
Dec 24, 2023



A precondition for the deployment of a Reinforcement Learning agent to a real-world system is to provide guarantees on the learning process. While a learning algorithm will eventually converge to a good policy, there are no guarantees on the performance of the exploratory policies. We study the problem of conservative exploration, where the learner must at least be able to guarantee its performance is at least as good as a baseline policy. We propose the first conservative provably efficient model-free algorithm for policy optimization in continuous finite-horizon problems. We leverage importance sampling techniques to counterfactually evaluate the conservative condition from the data self-generated by the algorithm. We derive a regret bound and show that (w.h.p.) the conservative constraint is never violated during learning. Finally, we leverage these insights to build a general schema for conservative exploration in DeepRL via off-policy policy evaluation techniques. We show empirically the effectiveness of our methods.
Conservative Optimistic Policy Optimization via Multiple Importance Sampling
Mar 04, 2021
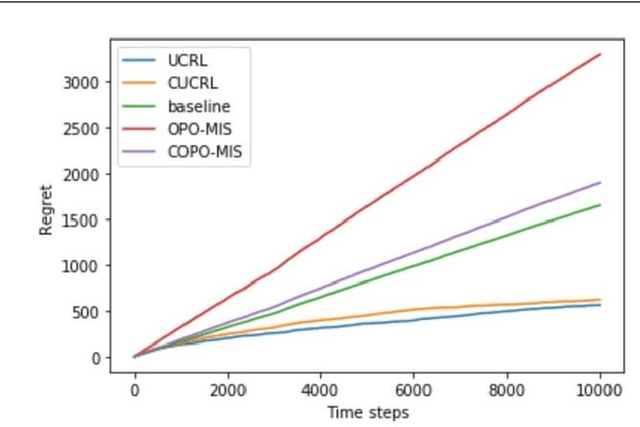
Reinforcement Learning (RL) has been able to solve hard problems such as playing Atari games or solving the game of Go, with a unified approach. Yet modern deep RL approaches are still not widely used in real-world applications. One reason could be the lack of guarantees on the performance of the intermediate executed policies, compared to an existing (already working) baseline policy. In this paper, we propose an online model-free algorithm that solves conservative exploration in the policy optimization problem. We show that the regret of the proposed approach is bounded by $\tilde{\mathcal{O}}(\sqrt{T})$ for both discrete and continuous parameter spaces.