 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs Pontryagin's Maximum Principle all you need? Solving optimal control problems with PMP-inspired neural networks
Oct 08, 2024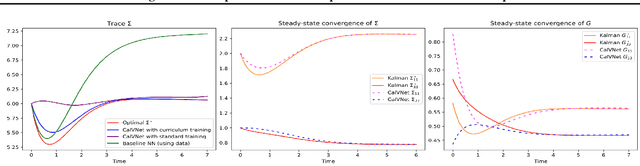
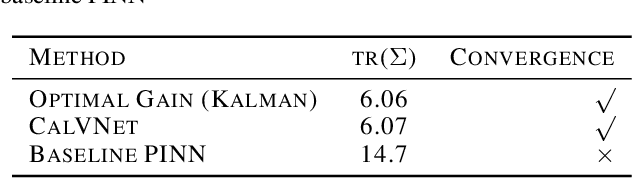
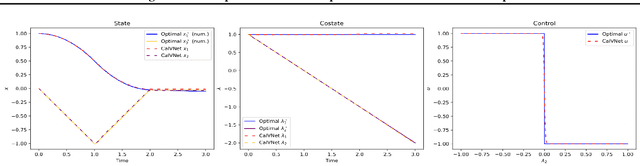
Calculus of Variations is the mathematics of functional optimization, i.e., when the solutions are functions over a time interval. This is particularly important when the time interval is unknown like in minimum-time control problems, so that forward in time solutions are not possible. Calculus of Variations offers a robust framework for learning optimal control and inference. How can this framework be leveraged to design neural networks to solve challenges in control and inference? We propose the Pontryagin's Maximum Principle Neural Network (PMP-net) that is tailored to estimate control and inference solutions, in accordance with the necessary conditions outlined by Pontryagin's Maximum Principle. We assess PMP-net on two classic optimal control and inference problems: optimal linear filtering and minimum-time control. Our findings indicate that PMP-net can be effectively trained in an unsupervised manner to solve these problems without the need for ground-truth data, successfully deriving the classical "Kalman filter" and "bang-bang" control solution. This establishes a new approach for addressing general, possibly yet unsolved, optimal control problems.
PhyOT: Physics-informed object tracking in surveillance cameras
Dec 14, 2023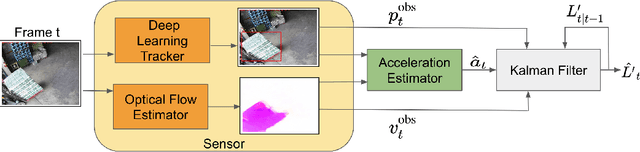
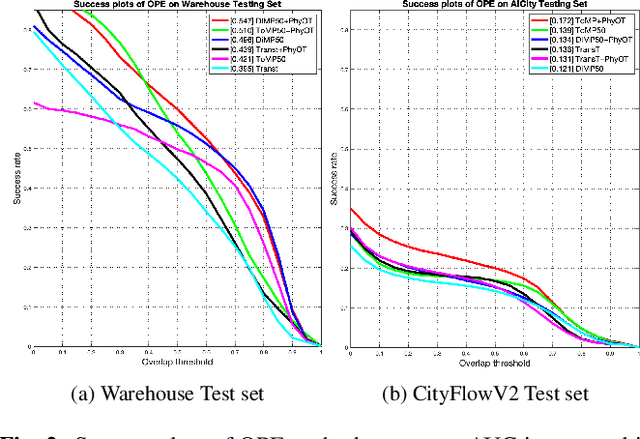
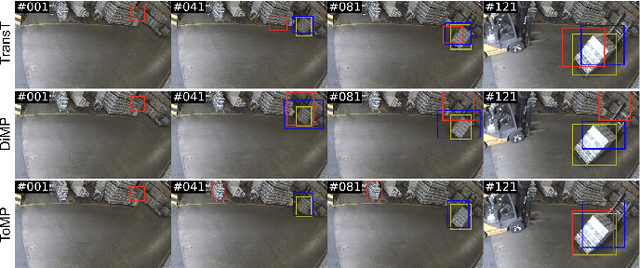
While deep learning has been very successful in computer vision, real world operating conditions such as lighting variation, background clutter, or occlusion hinder its accuracy across several tasks. Prior work has shown that hybrid models -- combining neural networks and heuristics/algorithms -- can outperform vanilla deep learning for several computer vision tasks, such as classification or tracking. We consider the case of object tracking, and evaluate a hybrid model (PhyOT) that conceptualizes deep neural networks as ``sensors'' in a Kalman filter setup, where prior knowledge, in the form of Newtonian laws of motion, is used to fuse sensor observations and to perform improved estimations. Our experiments combine three neural networks, performing position, indirect velocity and acceleration estimation, respectively, and evaluate such a formulation on two benchmark datasets: a warehouse security camera dataset that we collected and annotated and a traffic camera open dataset. Results suggest that our PhyOT can track objects in extreme conditions that the state-of-the-art deep neural networks fail while its performance in general cases does not degrade significantly from that of existing deep learning approaches. Results also suggest that our PhyOT components are generalizable and transferable.
AI For Fraud Awareness
Aug 16, 2023In today's world, with the rise of numerous social platforms, it has become relatively easy for anyone to spread false information and lure people into traps. Fraudulent schemes and traps are growing rapidly in the investment world. Due to this, countries and individuals face huge financial risks. We present an awareness system with the use of machine learning and gamification techniques to educate the people about investment scams and traps. Our system applies machine learning techniques to provide a personalized learning experience to the user. The system chooses distinct game-design elements and scams from the knowledge pool crafted by domain experts for each individual. The objective of the research project is to reduce inequalities in all countries by educating investors via Active Learning. Our goal is to assist the regulators in assuring a conducive environment for a fair, efficient, and inclusive capital market. In the paper, we discuss the impact of the problem, provide implementation details, and showcase the potentiality of the system through preliminary experiments and results.