 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMassively Scalable Inverse Reinforcement Learning in Google Maps
May 24, 2023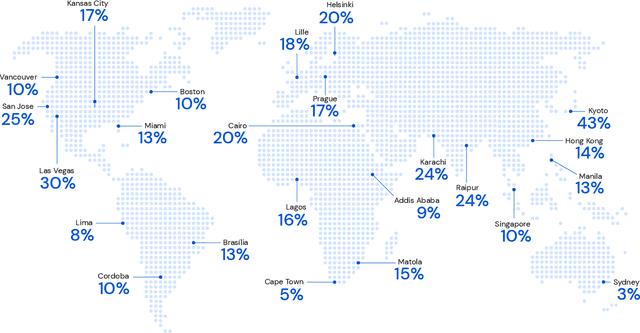
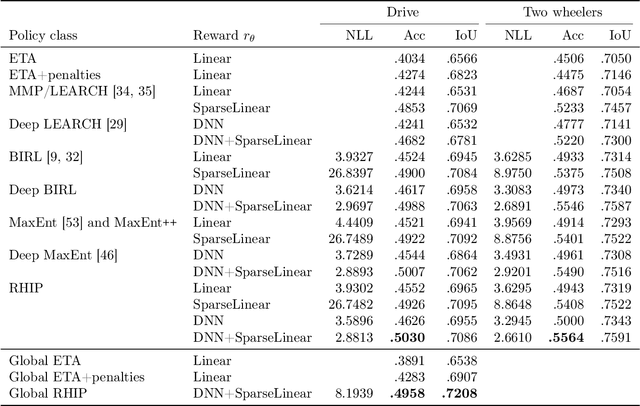
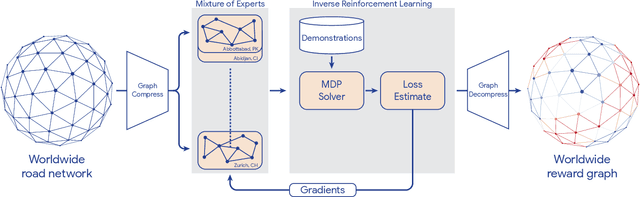

Optimizing for humans' latent preferences is a grand challenge in route recommendation, where globally-scalable solutions remain an open problem. Although past work created increasingly general solutions for the application of inverse reinforcement learning (IRL), these have not been successfully scaled to world-sized MDPs, large datasets, and highly parameterized models; respectively hundreds of millions of states, trajectories, and parameters. In this work, we surpass previous limitations through a series of advancements focused on graph compression, parallelization, and problem initialization based on dominant eigenvectors. We introduce Receding Horizon Inverse Planning (RHIP), which generalizes existing work and enables control of key performance trade-offs via its planning horizon. Our policy achieves a 16-24% improvement in global route quality, and, to our knowledge, represents the largest instance of IRL in a real-world setting to date. Our results show critical benefits to more sustainable modes of transportation (e.g. two-wheelers), where factors beyond journey time (e.g. route safety) play a substantial role. We conclude with ablations of key components, negative results on state-of-the-art eigenvalue solvers, and identify future opportunities to improve scalability via IRL-specific batching strategies.