 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Tracking of Highly Dynamic Autonomous Vehicle Trajectories via Iterative Learning Control
Feb 02, 2019



Iterative learning control has been successfully used for several decades to improve the performance of control systems that perform a single repeated task. Using information from prior control executions, learning controllers gradually determine open-loop control inputs whose reference tracking performance can exceed that of traditional feedback-feedforward control algorithms. This paper considers iterative learning control for a previously unexplored field: autonomous racing. Racecars are driven multiple laps around the same sequence of turns while operating near the physical limits of tire-road friction, where steering dynamics become highly nonlinear and transient, making accurate path tracking difficult. However, because the vehicle trajectory is identical for each lap in the case of single-car racing, the nonlinear vehicle dynamics and unmodelled road conditions are repeatable and can be accounted for using iterative learning control, provided the tire force limits have not been exceeded. This paper describes the design and application of proportional-derivative (PD) and quadratically optimal (Q-ILC) learning algorithms for multiple-lap path tracking of an autonomous race vehicle. Simulation results are used to tune controller gains and test convergence, and experimental results are presented on an Audi TTS race vehicle driving several laps around Thunderhill Raceway in Willows, CA at lateral accelerations of up to 8 $\mathrm{m/s^2}$. Both control algorithms are able to correct transient path tracking errors and improve the performance provided by a reference feedforward controller.
A Sequential Two-Step Algorithm for Fast Generation of Vehicle Racing Trajectories
Feb 02, 2019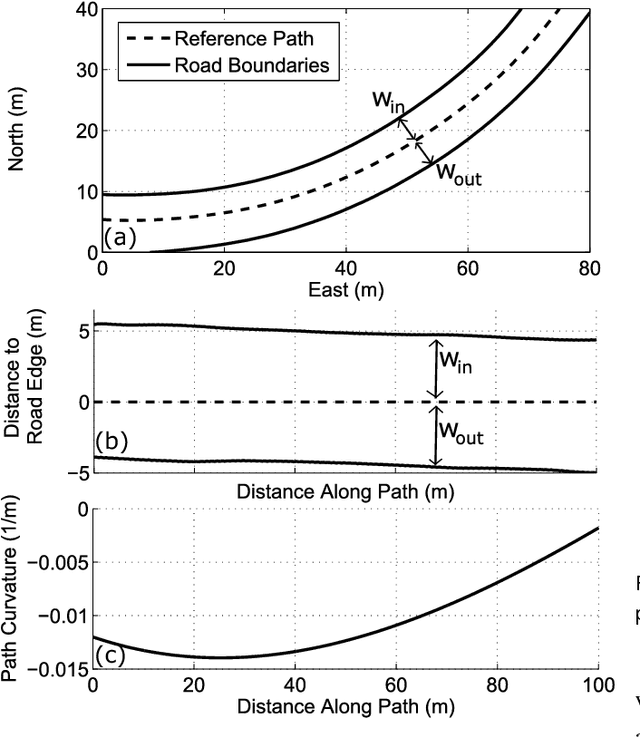
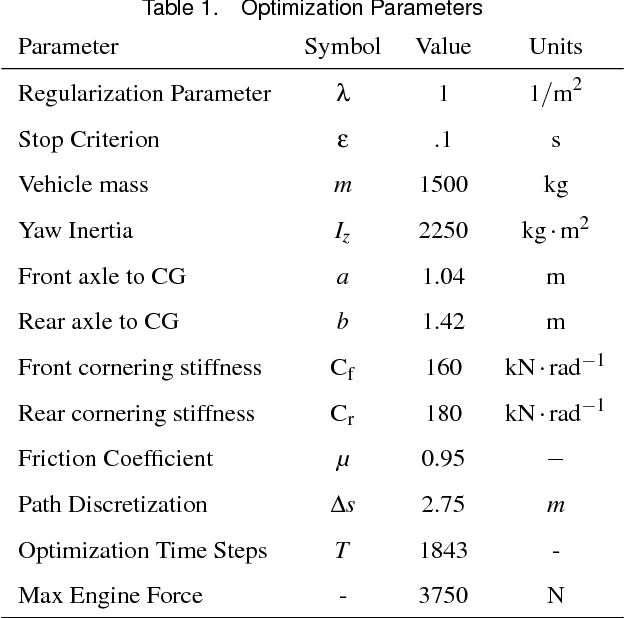


The problem of maneuvering a vehicle through a race course in minimum time requires computation of both longitudinal (brake and throttle) and lateral (steering wheel) control inputs. Unfortunately, solving the resulting nonlinear optimal control problem is typically computationally expensive and infeasible for real-time trajectory planning. This paper presents an iterative algorithm that divides the path generation task into two sequential subproblems that are significantly easier to solve. Given an initial path through the race track, the algorithm runs a forward-backward integration scheme to determine the minimum-time longitudinal speed profile, subject to tire friction constraints. With this fixed speed profile, the algorithm updates the vehicle's path by solving a convex optimization problem that minimizes the resulting path curvature while staying within track boundaries and obeying affine, time-varying vehicle dynamics constraints. This two-step process is repeated iteratively until the predicted lap time no longer improves. While providing no guarantees of convergence or a globally optimal solution, the approach performs very well when validated on the Thunderhill Raceway course in Willows, CA. The predicted lap time converges after four to five iterations, with each iteration over the full 4.5 km race course requiring only thirty seconds of computation time on a laptop computer. The resulting trajectory is experimentally driven at the race circuit with an autonomous Audi TTS test vehicle, and the resulting lap time and racing line is comparable to both a nonlinear gradient descent solution and a trajectory recorded from a professional racecar driver. The experimental results indicate that the proposed method is a viable option for online trajectory planning in the near future.
A Hybrid Control Design for Autonomous Vehicles at Uncontrolled Intersections
Feb 02, 2019
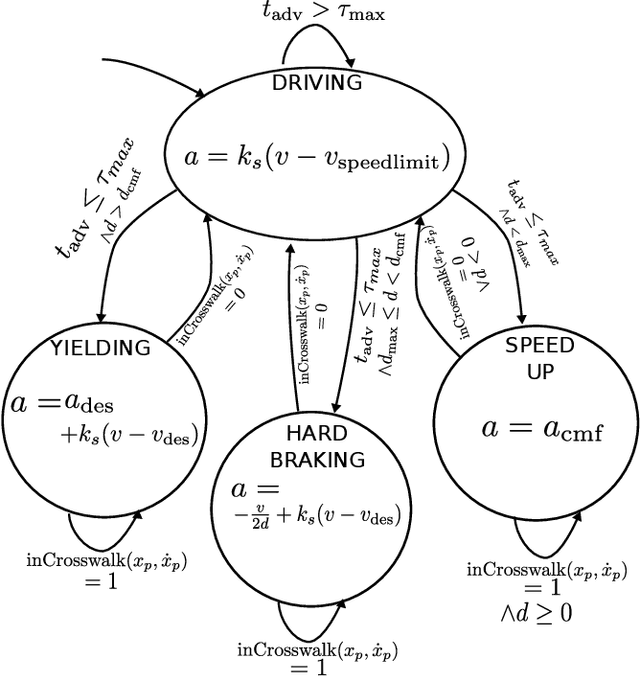
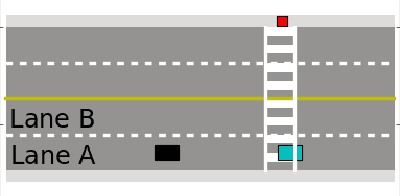

As autonomous vehicles (AVs) inch closer to reality, a central requirement for acceptance will be earning the trust of humans in everyday driving situations. In particular, the interaction between AVs and pedestrians is of high importance, as every human is a pedestrian at some point of the day. This paper considers the interaction of a pedestrian and an autonomous vehicle at a mid-block, unsignalized intersection where there is ambiguity over when the pedestrian should cross and when and how the vehicle should yield. By modeling pedestrian behavior through the concept of gap acceptance, the authors show that a hybrid controller with just four distinct modes allows an autonomous vehicle to successfully interact with a pedestrian across a continuous spectrum of possible crosswalk entry behaviors. The controller is validated through extensive simulation and compared to an alternate POMDP solution and experimental results are provided on a research vehicle for a virtual pedestrian.