 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward a Surgeon-in-the-Loop Ophthalmic Robotic Apprentice using Reinforcement and Imitation Learning
Nov 29, 2023


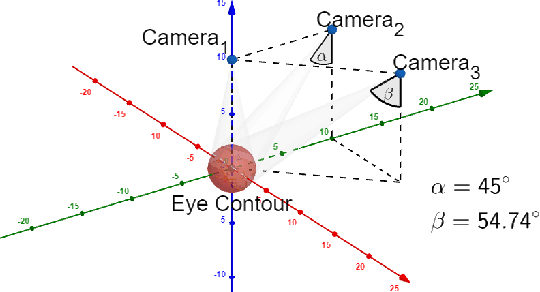
Robotic-assisted surgical systems have demonstrated significant potential in enhancing surgical precision and minimizing human errors. However, existing systems lack the ability to accommodate the unique preferences and requirements of individual surgeons. Additionally, they primarily focus on general surgeries (e.g., laparoscopy) and are not suitable for highly precise microsurgeries, such as ophthalmic procedures. Thus, we propose a simulation-based image-guided approach for surgeon-centered autonomous agents that can adapt to the individual surgeon's skill level and preferred surgical techniques during ophthalmic cataract surgery. Our approach utilizes a simulated environment to train reinforcement and imitation learning agents guided by image data to perform all tasks of the incision phase of cataract surgery. By integrating the surgeon's actions and preferences into the training process with the surgeon-in-the-loop, our approach enables the robot to implicitly learn and adapt to the individual surgeon's unique approach through demonstrations. This results in a more intuitive and personalized surgical experience for the surgeon. Simultaneously, it ensures consistent performance for the autonomous robotic apprentice. We define and evaluate the effectiveness of our approach using our proposed metrics; and highlight the trade-off between a generic agent and a surgeon-centered adapted agent. Moreover, our approach has the potential to extend to other ophthalmic surgical procedures, opening the door to a new generation of surgeon-in-the-loop autonomous surgical robots. We provide an open-source simulation framework for future development and reproducibility.
Teach Me How to Learn: A Perspective Review towards User-centered Neuro-symbolic Learning for Robotic Surgical Systems
Jul 07, 2023Recent advances in machine learning models allowed robots to identify objects on a perceptual nonsymbolic level (e.g., through sensor fusion and natural language understanding). However, these primarily black-box learning models still lack interpretation and transferability and require high data and computational demand. An alternative solution is to teach a robot on both perceptual nonsymbolic and conceptual symbolic levels through hybrid neurosymbolic learning approaches with expert feedback (i.e., human-in-the-loop learning). This work proposes a concept for this user-centered hybrid learning paradigm that focuses on robotic surgical situations. While most recent research focused on hybrid learning for non-robotic and some generic robotic domains, little work focuses on surgical robotics. We survey this related research while focusing on human-in-the-loop surgical robotic systems. This evaluation highlights the most prominent solutions for autonomous surgical robots and the challenges surgeons face when interacting with these systems. Finally, we envision possible ways to address these challenges using online apprenticeship learning based on implicit and explicit feedback from expert surgeons.