 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Relevant Counter-Examples from a Positive Unlabeled Dataset for Image Classification
Oct 04, 2019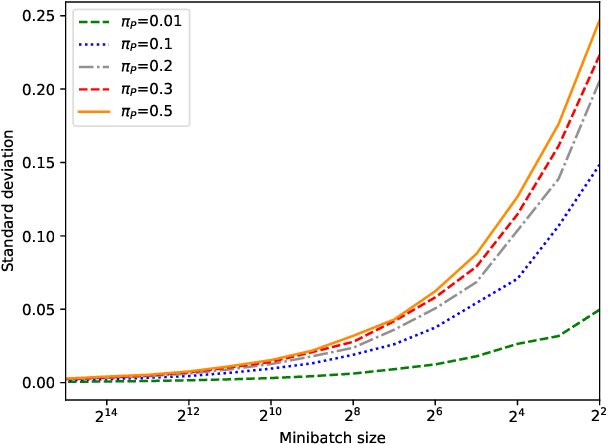
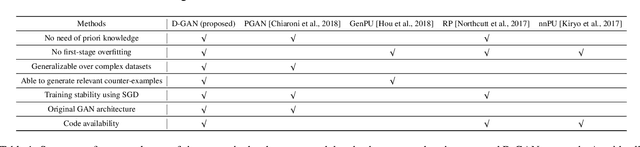
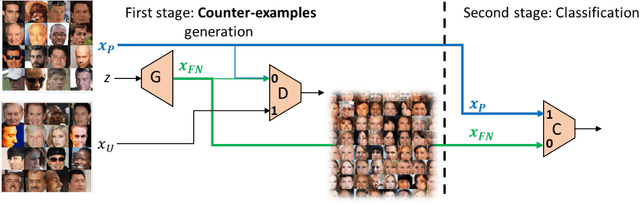

With surge of available but unlabeled data, Positive Unlabeled (PU) learning is becoming a thriving challenge. This work deals with this demanding task for which recent GAN-based PU approaches have demonstrated promising results. Generative adversarial Networks (GANs) are not hampered by deterministic bias or need for specific dimensionality. However, existing GAN-based PU approaches also present some drawbacks such as sensitive dependence to prior knowledge, a cumbersome architecture or first-stage overfitting. To settle these issues, we propose to incorporate a biased PU risk within the standard GAN discriminator loss function. In this manner, the discriminator is constrained to request the generator to converge towards the unlabeled samples distribution while diverging from the positive samples distribution. This enables the proposed model, referred to as D-GAN, to exclusively learn the counter-examples distribution without prior knowledge. Experiments demonstrate that our approach outperforms state-of-the-art PU methods without prior by overcoming their issues.
Self-supervised learning for autonomous vehicles perception: A conciliation between analytical and learning methods
Oct 03, 2019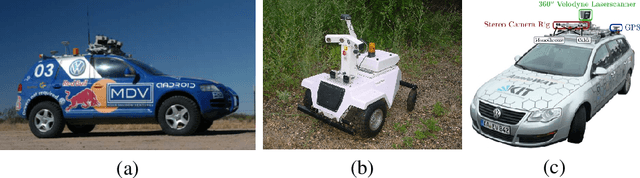

This article mainly aims at motivating more investigations on self-supervised learning (SSL) perception techniques and their applications in autonomous driving. Such approaches are of broad interest as they can improve analytical methods performances, for example to perceive farther and more accurately spatially or temporally. In the meantime, they can also reduce the need of hand-labeled training data for learning methods, while offering the possibility to update the learning models into an online process. This can help an autonomous system to deal with unexpected changing conditions in the ego-vehicle environment. In all, this article firstly highlights the analytical and learning tools which may be interesting for improving or developping SSL techniques. Then, it presents the insights and correlations between existing autonomous driving perception SSL techniques, and some of their remaining limitations opening up some future research perspectives.