 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-Based Multiple Camera Head Detection in Dense Crowds
Aug 02, 2018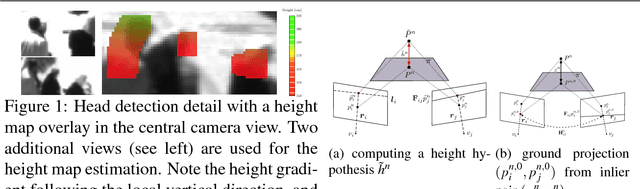
This paper addresses the problem of head detection in crowded environments. Our detection is based entirely on the geometric consistency across cameras with overlapping fields of view, and no additional learning process is required. We propose a fully unsupervised method for inferring scene and camera geometry, in contrast to existing algorithms which require specific calibration procedures. Moreover, we avoid relying on the presence of body parts other than heads or on background subtraction, which have limited effectiveness under heavy clutter. We cast the head detection problem as a stereo MRF-based optimization of a dense pedestrian height map, and we introduce a constraint which aligns the height gradient according to the vertical vanishing point direction. We validate the method in an outdoor setting with varying pedestrian density levels. With only three views, our approach is able to detect simultaneously tens of heavily occluded pedestrians across a large, homogeneous area.
2CoBel : An Efficient Belief Function Extension for Two-dimensional Continuous Spaces
Mar 23, 2018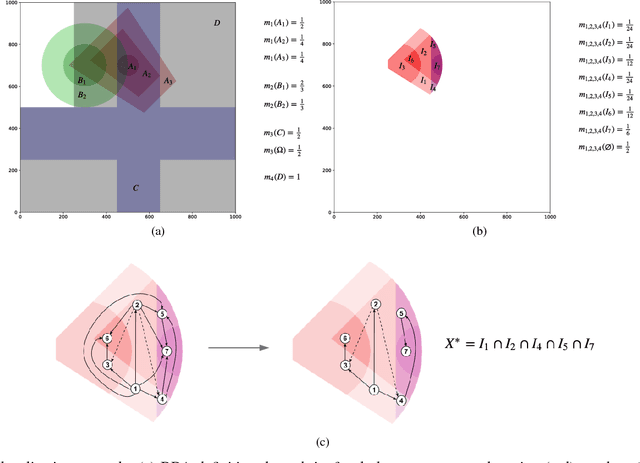
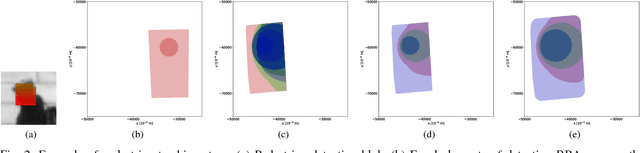
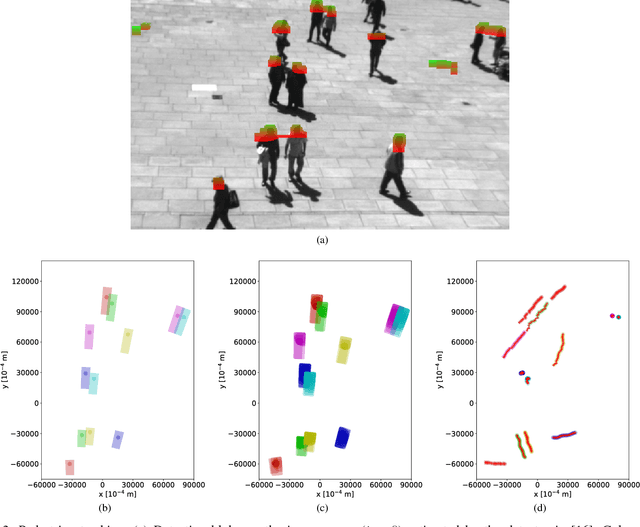
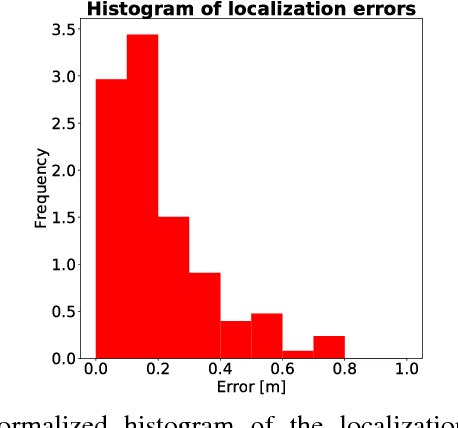
This paper introduces an innovative approach for handling 2D compound hypotheses within the Belief Function Theory framework. We propose a polygon-based generic rep- resentation which relies on polygon clipping operators. This approach allows us to account in the computational cost for the precision of the representation independently of the cardinality of the discernment frame. For the BBA combination and decision making, we propose efficient algorithms which rely on hashes for fast lookup, and on a topological ordering of the focal elements within a directed acyclic graph encoding their interconnections. Additionally, an implementation of the functionalities proposed in this paper is provided as an open source library. Experimental results on a pedestrian localization problem are reported. The experiments show that the solution is accurate and that it fully benefits from the scalability of the 2D search space granularity provided by our representation.