 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-Based Multiple Camera Head Detection in Dense Crowds
Paper and Code
Aug 02, 2018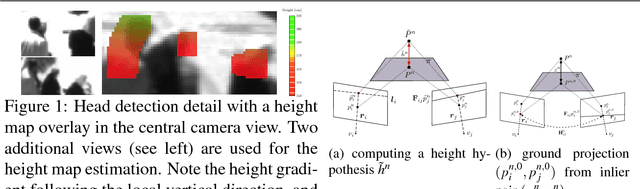
This paper addresses the problem of head detection in crowded environments. Our detection is based entirely on the geometric consistency across cameras with overlapping fields of view, and no additional learning process is required. We propose a fully unsupervised method for inferring scene and camera geometry, in contrast to existing algorithms which require specific calibration procedures. Moreover, we avoid relying on the presence of body parts other than heads or on background subtraction, which have limited effectiveness under heavy clutter. We cast the head detection problem as a stereo MRF-based optimization of a dense pedestrian height map, and we introduce a constraint which aligns the height gradient according to the vertical vanishing point direction. We validate the method in an outdoor setting with varying pedestrian density levels. With only three views, our approach is able to detect simultaneously tens of heavily occluded pedestrians across a large, homogeneous area.