 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Wrist Control on the Hannes Prosthesis: a Vision-based Shared Autonomy Framework
Feb 24, 2025



Most control techniques for prosthetic grasping focus on dexterous fingers control, but overlook the wrist motion. This forces the user to perform compensatory movements with the elbow, shoulder and hip to adapt the wrist for grasping. We propose a computer vision-based system that leverages the collaboration between the user and an automatic system in a shared autonomy framework, to perform continuous control of the wrist degrees of freedom in a prosthetic arm, promoting a more natural approach-to-grasp motion. Our pipeline allows to seamlessly control the prosthetic wrist to follow the target object and finally orient it for grasping according to the user intent. We assess the effectiveness of each system component through quantitative analysis and finally deploy our method on the Hannes prosthetic arm. Code and videos: https://hsp-iit.github.io/hannes-wrist-control.
Long-Term Upper-Limb Prosthesis Myocontrol via High-Density sEMG and Incremental Learning
Dec 20, 2024



Noninvasive human-machine interfaces such as surface electromyography (sEMG) have long been employed for controlling robotic prostheses. However, classical controllers are limited to few degrees of freedom (DoF). More recently, machine learning methods have been proposed to learn personalized controllers from user data. While promising, they often suffer from distribution shift during long-term usage, requiring costly model re-training. Moreover, most prosthetic sEMG sensors have low spatial density, which limits accuracy and the number of controllable motions. In this work, we address both challenges by introducing a novel myoelectric prosthetic system integrating a high density-sEMG (HD-sEMG) setup and incremental learning methods to accurately control 7 motions of the Hannes prosthesis. First, we present a newly designed, compact HD-sEMG interface equipped with 64 dry electrodes positioned over the forearm. Then, we introduce an efficient incremental learning system enabling model adaptation on a stream of data. We thoroughly analyze multiple learning algorithms across 7 subjects, including one with limb absence, and 6 sessions held in different days covering an extended period of several months. The size and time span of the collected data represent a relevant contribution for studying long-term myocontrol performance. Therefore, we release the DELTA dataset together with our experimental code.
Grasp Pre-shape Selection by Synthetic Training: Eye-in-hand Shared Control on the Hannes Prosthesis
Mar 18, 2022
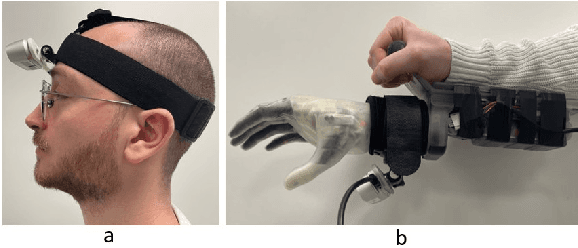
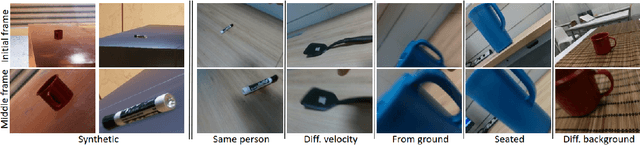
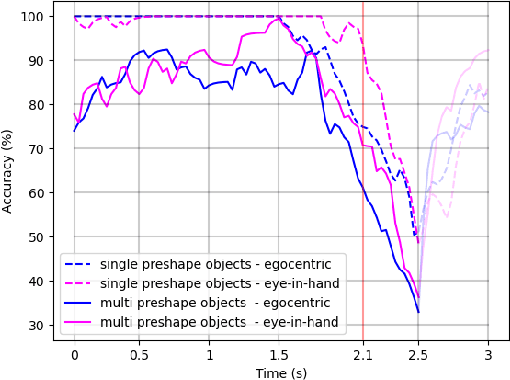
We consider the task of object grasping with a prosthetic hand capable of multiple grasp types. In this setting, communicating the intended grasp type often requires a high user cognitive load which can be reduced adopting shared autonomy frameworks. Among these, so-called eye-in-hand systems automatically control the hand aperture and pre-shaping before the grasp, based on visual input coming from a camera on the wrist. In this work, we present an eye-in-hand learning-based approach for hand pre-shape classification from RGB sequences. In order to reduce the need for tedious data collection sessions for training the system, we devise a pipeline for rendering synthetic visual sequences of hand trajectories for the purpose. We tackle the peculiarity of the eye-in-hand setting by means of a model for the human arm trajectories, with domain randomization over relevant visual elements. We develop a sensorized setup to acquire real human grasping sequences for benchmarking and show that, compared on practical use cases, models trained with our synthetic dataset achieve better generalization performance than models trained on real data. We finally integrate our model on the Hannes prosthetic hand and show its practical effectiveness. Our code, real and synthetic datasets will be released upon acceptance.