 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow Rank Tensor Completion via Adaptive ADMM
May 05, 2026We consider a novel algorithm, for the completion of partially observed low-rank tensors, as a generalization of matrix completion. The proposed low-rank tensor completion (TC) method builds on the conventional nuclear norm (NN) minimization-based low-rank TC paradigm, by leveraging the alternating direction method of multipliers (ADMM) optimization framework. To that extend the original NN minimization problem is reformulated into multiple subproblems, which are then solved iteratively via closed-form proximal operators, making use of over-relaxation and an adaptive penalty parameter update scheme, to further speed up convergence and improve the overall performance of the method. Simulation results demonstrate the superior performance of the new method in terms of normalized mean square error (NMSE), compared to the conventional state-of-the-art (SotA) techniques, including NN minimization approaches, as well as a mixture of the latter with a matrix factorization approach, while its convergence can be significantly improved by initializing the algorithm with the solution of the SotA.
Discrete Aware Tensor Completion via Convexized $\ell_0$-Norm Approximation
Feb 05, 2026We consider a novel algorithm, for the completion of partially observed low-rank tensors, where each entry of the tensor can be chosen from a discrete finite alphabet set, such as in common image processing problems, where the entries represent the RGB values. The proposed low-rank tensor completion (TC) method builds on the conventional nuclear norm (NN) minimization-based low-rank TC paradigm, through the addition of a discrete-aware regularizer, which enforces discreteness in the objective of the problem, by an $\ell_0$-norm regularizer that is approximated by a continuous and differentiable function normalized via fractional programming (FP) under a proximal gradient (PG) framework, in order to solve the proposed problem. Simulation results demonstrate the superior performance of the new method both in terms of normalized mean square error (NMSE) and convergence, compared to the conventional state of-the-art (SotA) techniques, including NN minimization approaches, as well as a mixture of the latter with a matrix factorization approach.
Rigid Body Localization via Gaussian Belief Propagation with Quadratic Angle Approximation
Feb 04, 2026Gaussian belief propagation (GaBP) is a technique that relies on linearized error and input-output models to yield low-complexity solutions to complex estimation problems, which has been recently shown to be effective in the design of range-based GaBP schemes for stationary and moving rigid body localization (RBL) in three-dimensional (3D) space, as long as an accurate prior on the orientation of the target rigid body is available. In this article we present a novel range-based RBL scheme via GaBP that removes the latter limitation. To this end, the proposed method incorporates a quadratic angle approximation to linearize the relative orientation between the prior and the target rigid body, enabling high precision estimates of corresponding rotation angles even for large deviations. Leveraging the resulting linearized model, we derive the corresponding message-passing (MP) rules to obtain estimates of the translation vector and rotation matrix of the target rigid body, relative to a prior reference frame. Numerical results corroborate the good performance of the proposed angle approximation itself, as well as the consequent RBL performance in terms of root mean square errors (RMSEs) in comparison to the state-of-the-art (SotA), while maintaining a low computational complexity
Fundamental Limits of Rigid Body Localization
Jul 30, 2025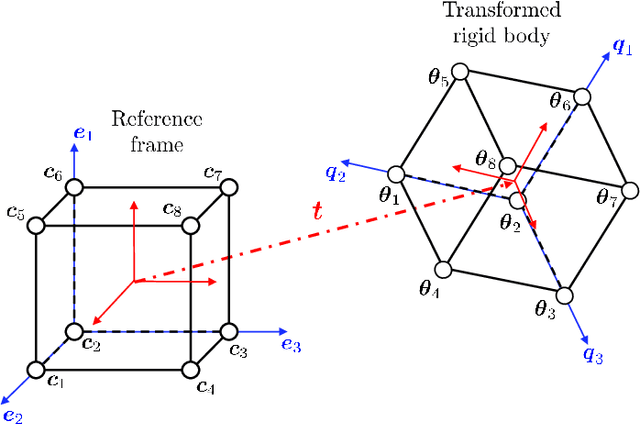
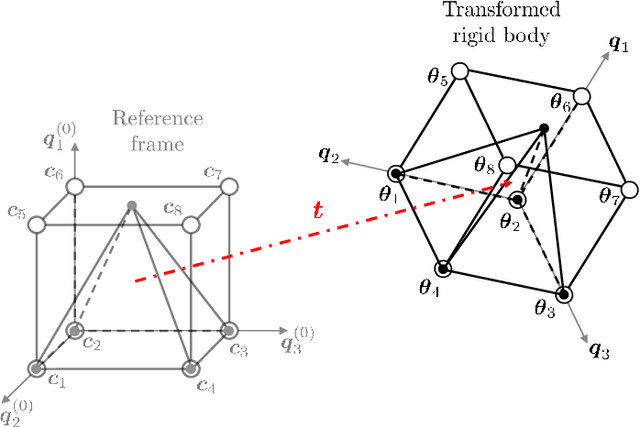
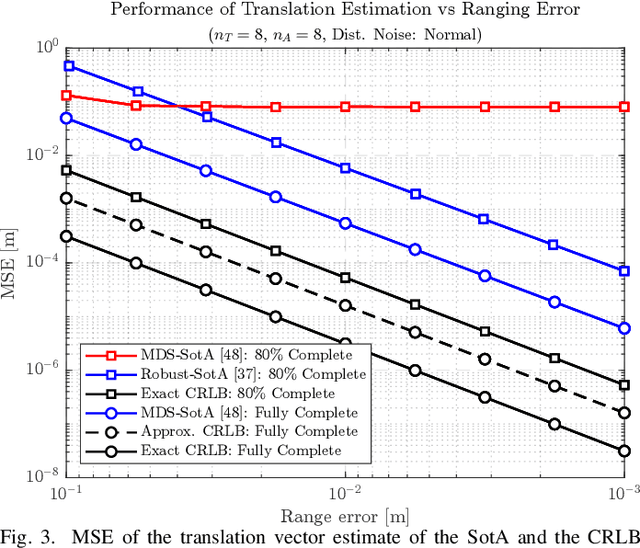
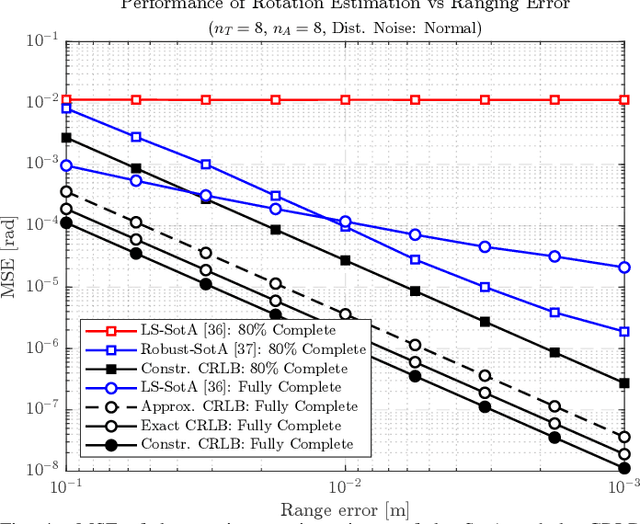
We consider a novel approach to formulate the Cram\'er-Rao Lower Bound (CRLB) for the rigid body localization (RBL) problem, which allows us to assess the fundamental accuracy limits on the estimation of the translation and rotation of a rigid body with respect to a known reference. To that end, we adopt an information-centric construction of the Fisher information matrix (FIM), which allows to capture the contribution of each measurement towards the FIM, both in terms of input measurement types, as well as of their error distributions. Taking advantage of this approach, we derive a generic framework for the CRLB formulation, which is applicable to any type of rigid body localization scenario, extending the conventional FIM formulation suitable for point targets to the case of a rigid body whose location include both translation vector and the rotation matrix (or alternative the rotation angles), with respect to a reference. Closed-form expressions for all CRLBs are given, including the bound incorporating an orthonormality constraint onto the rotation matrix. Numerical results illustrate that the derived expression correctly lower-bounds the errors of estimated localization parameters obtained via various related state-of-the-art (SotA) estimators, revealing their accuracies and suggesting that SotA RBL algorithms can still be improved.
A Robust Routing Protocol for 5G Mesh Networks
Mar 19, 2025



We consider a novel routing protocol suitable for ad-hoc networks with dynamically changing topologies, such as DECT 2020 NR (NR+) systems, which often lead to missing links between the nodes and thus, incomplete or inefficient routes. A key point of the proposed protocol is the combination of network discovery and matrix completion techniques, which allow the nodes to establish communication paths efficiently and reliably. Additionally, multihop localization is performed to estimate the location of the nodes without needing to broadcast each node's geographical position, thus preserving privacy during the routing process and enabling nodes in the network to independently find potentially missing paths in a decentralized manner instead of flooding the whole network. Simulation results illustrate the good performance of the proposed technique in terms of the average number of hops of the obtained routes in different scenarios, with different network densities and amounts of incompleteness.
Robust Egoistic Rigid Body Localization
Jan 17, 2025



We consider a robust and self-reliant (or "egoistic") variation of the rigid body localization (RBL) problem, in which a primary rigid body seeks to estimate the pose (i.e., location and orientation) of another rigid body (or "target"), relative to its own, without the assistance of external infrastructure, without prior knowledge of the shape of the target, and taking into account the possibility that the available observations are incomplete. Three complementary contributions are then offered for such a scenario. The first is a method to estimate the translation vector between the center point of both rigid bodies, which unlike existing techniques does not require that both objects have the same shape or even the same number of landmark points. This technique is shown to significantly outperform the state-of-the-art (SotA) under complete information, but to be sensitive to data erasures, even when enhanced by matrix completion methods. The second contribution, designed to offer improved performance in the presence of incomplete information, offers a robust alternative to the latter, at the expense of a slight relative loss under complete information. Finally, the third contribution is a scheme for the estimation of the rotation matrix describing the relative orientation of the target rigid body with respect to the primary. Comparisons of the proposed schemes and SotA techniques demonstrate the advantage of the contributed methods in terms of root mean square error (RMSE) performance under fully complete information and incomplete conditions.
Enabling Next-Generation V2X Perception: Wireless Rigid Body Localization and Tracking
Aug 01, 2024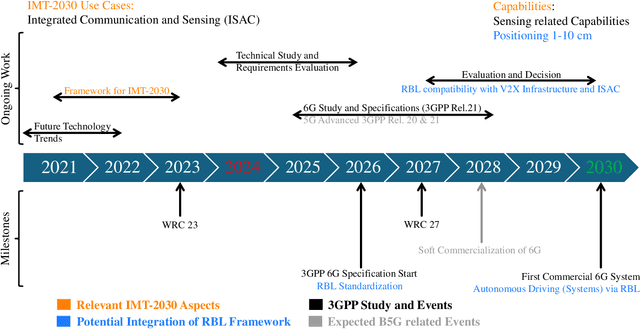



Vehicle-to-everything (V2X) perception describes a suite of technologies used to enable vehicles to perceive their surroundings and communicate with various entities, such as other road users, infrastructure, or the network/cloud. With the development of autonomous driving, V2X perception is becoming increasingly relevant, as can be seen by the tremendous attention recently given to integrated sensing and communication (ISAC) technologies. In this context, rigid body localization (RBL) also emerges as one important technology which enables the estimation of not only target's positions, but also their shape and orientation. This article discusses the need for RBL, its benefits and opportunities, challenges and research directions, as well as its role in the standardization of the sixth-generation (6G) and beyond fifth generation (B5G) applications.
Belief Propagation-based Rotation and Translation Estimation for Rigid Body Localization
Jul 12, 2024We propose a novel solution to the rigid body localization (RBL) problem, in which the three-dimensional (3D) rotation and translation is estimated by only utilizing the range measurements between the wireless sensors on the rigid body and the anchor sensors. The proposed framework first constructs a linear Gaussian belief propagation (GaBP) algorithm to estimate the absolute sensor positions utilizing the range-based received signal model, which is used for the reconstruction of the RBL transformation model, linearized with a small-angle approximation. In light of the reformulated system, a second bivariate GaBP is designed to directly estimate the 3D rotation angles and translation distances, with an interference cancellation (IC) refinement to improve the angle estimation performance. The effectiveness of the proposed method is verified via numerical simulations, highlighting the superior performance of the proposed method against the state-of-the-art (SotA) techniques for the position, rotation, and translation estimation performance.
Discrete Aware Matrix Completion via Convexized $\ell_0$-Norm Approximation
May 03, 2024


We consider a novel algorithm, for the completion of partially observed low-rank matrices in a structured setting where each entry can be chosen from a finite discrete alphabet set, such as in common recommender systems. The proposed low-rank matrix completion (MC) method is an improved variation of state-of-the-art (SotA) discrete aware matrix completion method which we previously proposed, in which discreteness is enforced by an $\ell_0$-norm regularizer, not by replaced with the $\ell_1$-norm, but instead approximated by a continuous and differentiable function normalized via fractional programming (FP) under a proximal gradient (PG) framework. Simulation results demonstrate the superior performance of the new method compared to the SotA techniques as well as the earlier $\ell_1$-norm-based discrete-aware matrix completion approach.
Soft-connected Rigid Body Localization: State-of-the-Art and Research Directions for 6G
Sep 10, 2023This white paper describes a proposed article that will aim to provide a thorough study of the evolution of the typical paradigm of wireless localization (WL), which is based on a single point model of each target, towards wireless rigid body localization (W-RBL). We also look beyond the concept of RBL itself, whereby each target is modeled as an independent multi-point three-dimensional (3D), with shape enforced via a set of conformation constraints, as a step towards a more general approach we refer to as soft-connected RBL, whereby an ensemble of several objects embedded in a given environment, is modeled as a set of soft-connected 3D objects, with rigid and soft conformation constraints enforced within each object and among them, respectively. A first intended contribution of the full version of this article is a compact but comprehensive survey on mechanisms to evolve WL algorithms in W-RBL schemes, considering their peculiarities in terms of the type of information, mathematical approach, and features the build on or offer. A subsequent contribution is a discussion of mechanisms to extend W-RBL techniques to soft-connected rigid body localization (SCW-RBL) algorithms.