 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Modal-Space Formulation for Momentum Observer Contact Estimation and Effects of Uncertainty for Continuum Robots
May 05, 2025



Contact detection for continuum and soft robots has been limited in past works to statics or kinematics-based methods with assumed circular bending curvature or known bending profiles. In this paper, we adapt the generalized momentum observer contact estimation method to continuum robots. This is made possible by leveraging recent results for real-time shape sensing of continuum robots along with a modal-space representation of the robot dynamics. In addition to presenting an approach for estimating the generalized forces due to contact via a momentum observer, we present a constrained optimization method to identify the wrench imparted on the robot during contact. We also present an approach for investigating the effects of unmodeled deviations in the robot's dynamic state on the contact detection method and we validate our algorithm by simulations and experiments. We also compare the performance of the momentum observer to the joint force deviation method, a direct estimation approach using the robot's full dynamic model. We also demonstrate a basic extension of the method to multisegment continuum robots. Results presented in this work extend dynamic contact detection to the domain of continuum and soft robots and can be used to improve the safety of large-scale continuum robots for human-robot collaboration.
Feasibility of Remote Landmark Identification for Cricothyrotomy Using Robotic Palpation
Oct 22, 2021

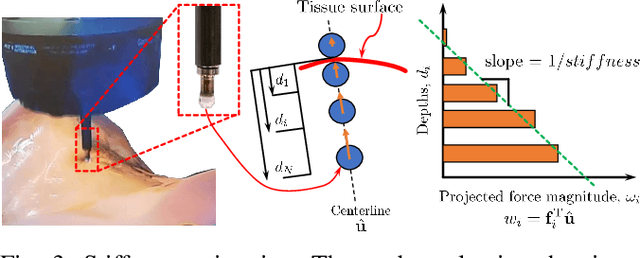
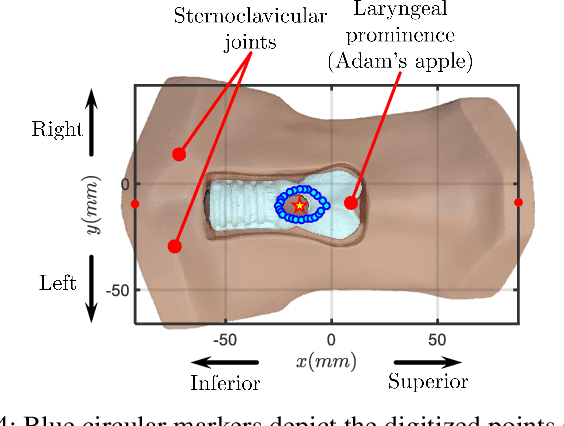
Cricothyrotomy is a life-saving emergency intervention that secures an alternate airway route after a neck injury or obstruction. The procedure starts with identifying the correct location (the cricothyroid membrane) for creating an incision to insert an endotracheal tube. This location is determined using a combination of visual and palpation cues. Enabling robot-assisted remote cricothyrotomy may extend this life-saving procedure to injured soldiers or patients who may not be readily accessible for on-site intervention during search-and-rescue scenarios. As a first step towards achieving this goal, this paper explores the feasibility of palpation-assisted landmark identification for cricothyrotomy. Using a cricothyrotomy training simulator, we explore several alternatives for in-situ remote localization of the cricothyroid membrane. These alternatives include a) unaided telemanipulation, b) telemanipulation with direct force feedback, c) telemanipulation with superimposed motion excitation for online stiffness estimation and display, and d) fully autonomous palpation scan initialized based on the user's understanding of key anatomical landmarks. Using the manually digitized cricothyroid membrane location as ground truth, we compare these four methods for accuracy and repeatability of identifying the landmark for cricothyrotomy, time of completion, and ease of use. These preliminary results suggest that the accuracy of remote cricothyrotomy landmark identification is improved when the user is aided with visual and force cues. They also show that, with proper user initialization, landmark identification using remote palpation is feasible - therefore satisfying a key pre-requisite for future robotic solutions for remote cricothyrotomy.