 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeasibility of Remote Landmark Identification for Cricothyrotomy Using Robotic Palpation
Oct 22, 2021

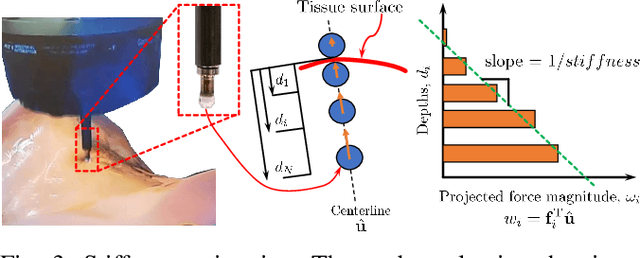
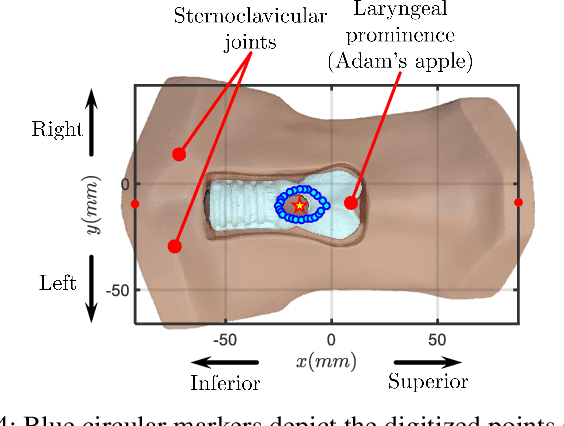
Cricothyrotomy is a life-saving emergency intervention that secures an alternate airway route after a neck injury or obstruction. The procedure starts with identifying the correct location (the cricothyroid membrane) for creating an incision to insert an endotracheal tube. This location is determined using a combination of visual and palpation cues. Enabling robot-assisted remote cricothyrotomy may extend this life-saving procedure to injured soldiers or patients who may not be readily accessible for on-site intervention during search-and-rescue scenarios. As a first step towards achieving this goal, this paper explores the feasibility of palpation-assisted landmark identification for cricothyrotomy. Using a cricothyrotomy training simulator, we explore several alternatives for in-situ remote localization of the cricothyroid membrane. These alternatives include a) unaided telemanipulation, b) telemanipulation with direct force feedback, c) telemanipulation with superimposed motion excitation for online stiffness estimation and display, and d) fully autonomous palpation scan initialized based on the user's understanding of key anatomical landmarks. Using the manually digitized cricothyroid membrane location as ground truth, we compare these four methods for accuracy and repeatability of identifying the landmark for cricothyrotomy, time of completion, and ease of use. These preliminary results suggest that the accuracy of remote cricothyrotomy landmark identification is improved when the user is aided with visual and force cues. They also show that, with proper user initialization, landmark identification using remote palpation is feasible - therefore satisfying a key pre-requisite for future robotic solutions for remote cricothyrotomy.
Medical Technologies and Challenges of Robot Assisted Minimally Invasive Intervention and Diagnostics
Jul 10, 2018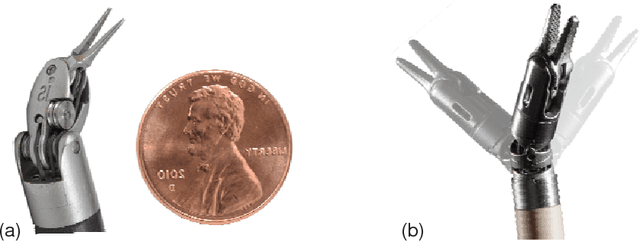
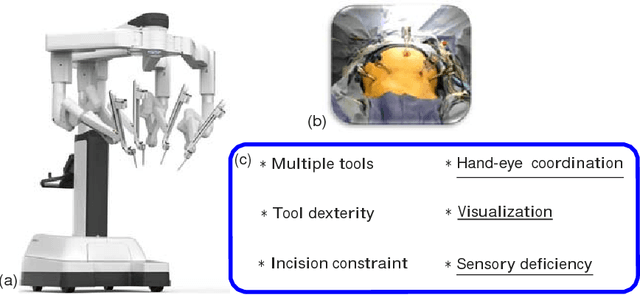
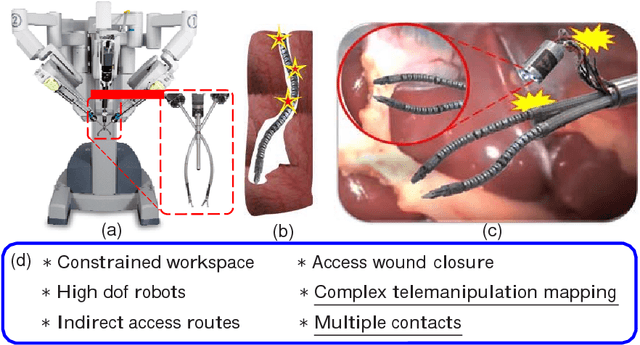
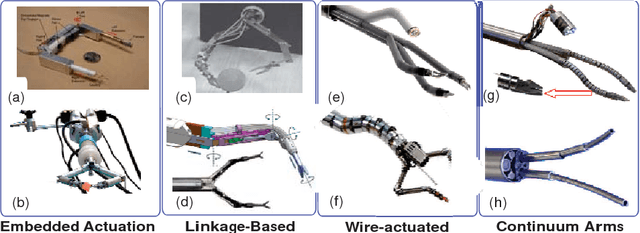
Emerging paradigms furthering the reach of medical technology deeper into human anatomy present unique modeling, control and sensing problems. This paper discusses a brief history of medical robotics leading to the current trend of minimally invasive intervention and diagnostics in confined spaces. Robotics for natural orifice and single port access surgery, capsule and magnetically actuated robotics and microrobotics are discussed with the aim of elucidating the state of the art. Works on modeling, sensing and control of mechanical architectures of robots for natural orifice and single port access surgery are discussed, followed by a presentation of works on magnetic actuation, sensing and localization for capsule robotics and microrobotics. Finally challenges and open problems in each one of these areas are presented.