 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSame Words, Different Judgments: Modality Effects on Preference Alignment
Feb 26, 2026Preference-based reinforcement learning (PbRL) is the dominant framework for aligning AI systems to human preferences, but its application to speech remains underexplored. We present a controlled cross-modal study of human and synthetic preference annotations, comparing text and audio evaluations of identical semantic content across 100 prompts. Audio preferences prove as reliable as text, with inter-rater agreement reaching good levels (ICC(2,k) $\approx$ .80) at $\sim$9 raters -- the first ICC-based reliability characterization in the preference annotation literature for either modality. However, modality reshapes how people judge: audio raters exhibit narrower decision thresholds, reduced length bias, and more user-oriented evaluation criteria, with near-chance cross-modality agreement. Synthetic ratings further align with human judgments and predict inter-rater agreement, supporting their use both for triaging ambiguous pairs and as full replacements for human annotations.
SweeperBot: Making 3D Browsing Accessible through View Analysis and Visual Question Answering
Nov 19, 2025Accessing 3D models remains challenging for Screen Reader (SR) users. While some existing 3D viewers allow creators to provide alternative text, they often lack sufficient detail about the 3D models. Grounded on a formative study, this paper introduces SweeperBot, a system that enables SR users to leverage visual question answering to explore and compare 3D models. SweeperBot answers SR users' visual questions by combining an optimal view selection technique with the strength of generative- and recognition-based foundation models. An expert review with 10 Blind and Low-Vision (BLV) users with SR experience demonstrated the feasibility of using SweeperBot to assist BLV users in exploring and comparing 3D models. The quality of the descriptions generated by SweeperBot was validated by a second survey study with 30 sighted participants.
Preference-Based Learning in Audio Applications: A Systematic Analysis
Nov 17, 2025



Despite the parallel challenges that audio and text domains face in evaluating generative model outputs, preference learning remains remarkably underexplored in audio applications. Through a PRISMA-guided systematic review of approximately 500 papers, we find that only 30 (6%) apply preference learning to audio tasks. Our analysis reveals a field in transition: pre-2021 works focused on emotion recognition using traditional ranking methods (rankSVM), while post-2021 studies have pivoted toward generation tasks employing modern RLHF frameworks. We identify three critical patterns: (1) the emergence of multi-dimensional evaluation strategies combining synthetic, automated, and human preferences; (2) inconsistent alignment between traditional metrics (WER, PESQ) and human judgments across different contexts; and (3) convergence on multi-stage training pipelines that combine reward signals. Our findings suggest that while preference learning shows promise for audio, particularly in capturing subjective qualities like naturalness and musicality, the field requires standardized benchmarks, higher-quality datasets, and systematic investigation of how temporal factors unique to audio impact preference learning frameworks.
Can Language Models Understand Social Behavior in Clinical Conversations?
May 07, 2025Effective communication between providers and their patients influences health and care outcomes. The effectiveness of such conversations has been linked not only to the exchange of clinical information, but also to a range of interpersonal behaviors; commonly referred to as social signals, which are often conveyed through non-verbal cues and shape the quality of the patient-provider relationship. Recent advances in large language models (LLMs) have demonstrated an increasing ability to infer emotional and social behaviors even when analyzing only textual information. As automation increases also in clinical settings, such as for transcription of patient-provider conversations, there is growing potential for LLMs to automatically analyze and extract social behaviors from these interactions. To explore the foundational capabilities of LLMs in tracking social signals in clinical dialogue, we designed task-specific prompts and evaluated model performance across multiple architectures and prompting styles using a highly imbalanced, annotated dataset spanning 20 distinct social signals such as provider dominance, patient warmth, etc. We present the first system capable of tracking all these 20 coded signals, and uncover patterns in LLM behavior. Further analysis of model configurations and clinical context provides insights for enhancing LLM performance on social signal processing tasks in healthcare settings.
Predicting Trust In Autonomous Vehicles: Modeling Young Adult Psychosocial Traits, Risk-Benefit Attitudes, And Driving Factors With Machine Learning
Sep 13, 2024



Low trust remains a significant barrier to Autonomous Vehicle (AV) adoption. To design trustworthy AVs, we need to better understand the individual traits, attitudes, and experiences that impact people's trust judgements. We use machine learning to understand the most important factors that contribute to young adult trust based on a comprehensive set of personal factors gathered via survey (n = 1457). Factors ranged from psychosocial and cognitive attributes to driving style, experiences, and perceived AV risks and benefits. Using the explainable AI technique SHAP, we found that perceptions of AV risks and benefits, attitudes toward feasibility and usability, institutional trust, prior experience, and a person's mental model are the most important predictors. Surprisingly, psychosocial and many technology- and driving-specific factors were not strong predictors. Results highlight the importance of individual differences for designing trustworthy AVs for diverse groups and lead to key implications for future design and research.
What Did My Car Say? Impact of Autonomous Vehicle Explanation Errors and Driving Context On Comfort, Reliance, Satisfaction, and Driving Confidence
Sep 10, 2024
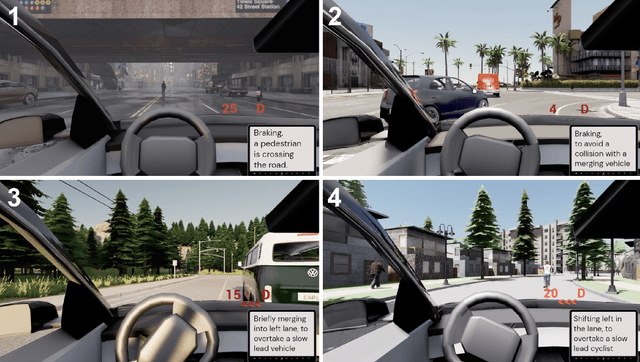

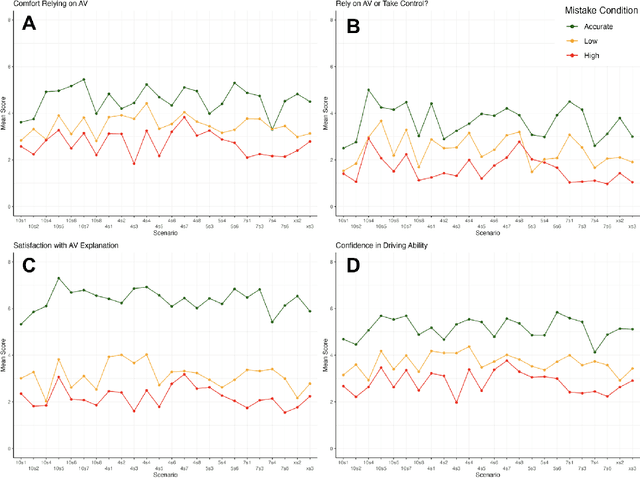
Explanations for autonomous vehicle (AV) decisions may build trust, however, explanations can contain errors. In a simulated driving study (n = 232), we tested how AV explanation errors, driving context characteristics (perceived harm and driving difficulty), and personal traits (prior trust and expertise) affected a passenger's comfort in relying on an AV, preference for control, confidence in the AV's ability, and explanation satisfaction. Errors negatively affected all outcomes. Surprisingly, despite identical driving, explanation errors reduced ratings of the AV's driving ability. Severity and potential harm amplified the negative impact of errors. Contextual harm and driving difficulty directly impacted outcome ratings and influenced the relationship between errors and outcomes. Prior trust and expertise were positively associated with outcome ratings. Results emphasize the need for accurate, contextually adaptive, and personalized AV explanations to foster trust, reliance, satisfaction, and confidence. We conclude with design, research, and deployment recommendations for trustworthy AV explanation systems.
Developing Situational Awareness for Joint Action with Autonomous Vehicles
Apr 17, 2024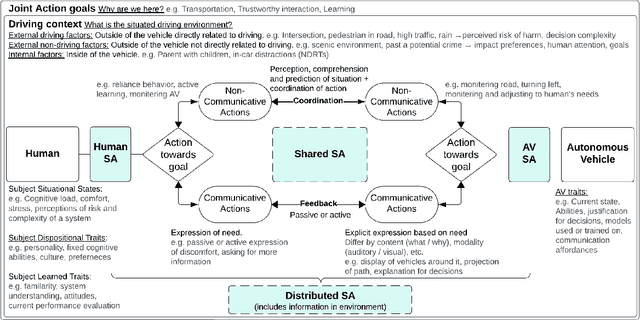
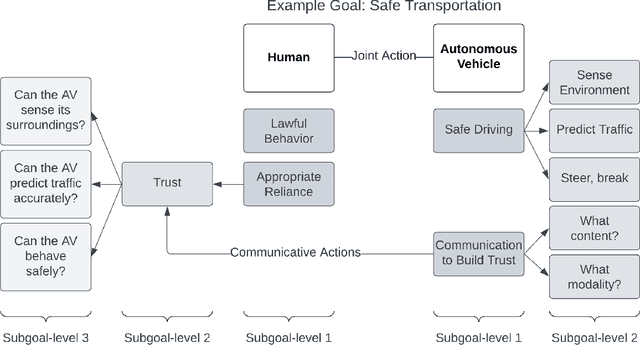
Unanswered questions about how human-AV interaction designers can support rider's informational needs hinders Autonomous Vehicles (AV) adoption. To achieve joint human-AV action goals - such as safe transportation, trust, or learning from an AV - sufficient situational awareness must be held by the human, AV, and human-AV system collectively. We present a systems-level framework that integrates cognitive theories of joint action and situational awareness as a means to tailor communications that meet the criteria necessary for goal success. This framework is based on four components of the shared situation: AV traits, action goals, subject-specific traits and states, and the situated driving context. AV communications should be tailored to these factors and be sensitive when they change. This framework can be useful for understanding individual, shared, and distributed human-AV situational awareness and designing for future AV communications that meet the informational needs and goals of diverse groups and in diverse driving contexts.