 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Trust In Autonomous Vehicles: Modeling Young Adult Psychosocial Traits, Risk-Benefit Attitudes, And Driving Factors With Machine Learning
Sep 13, 2024



Low trust remains a significant barrier to Autonomous Vehicle (AV) adoption. To design trustworthy AVs, we need to better understand the individual traits, attitudes, and experiences that impact people's trust judgements. We use machine learning to understand the most important factors that contribute to young adult trust based on a comprehensive set of personal factors gathered via survey (n = 1457). Factors ranged from psychosocial and cognitive attributes to driving style, experiences, and perceived AV risks and benefits. Using the explainable AI technique SHAP, we found that perceptions of AV risks and benefits, attitudes toward feasibility and usability, institutional trust, prior experience, and a person's mental model are the most important predictors. Surprisingly, psychosocial and many technology- and driving-specific factors were not strong predictors. Results highlight the importance of individual differences for designing trustworthy AVs for diverse groups and lead to key implications for future design and research.
What Did My Car Say? Impact of Autonomous Vehicle Explanation Errors and Driving Context On Comfort, Reliance, Satisfaction, and Driving Confidence
Sep 10, 2024
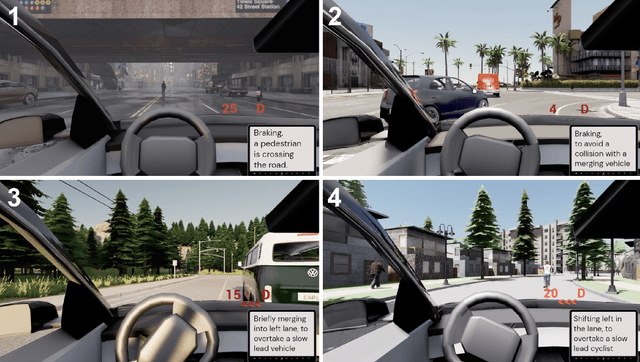

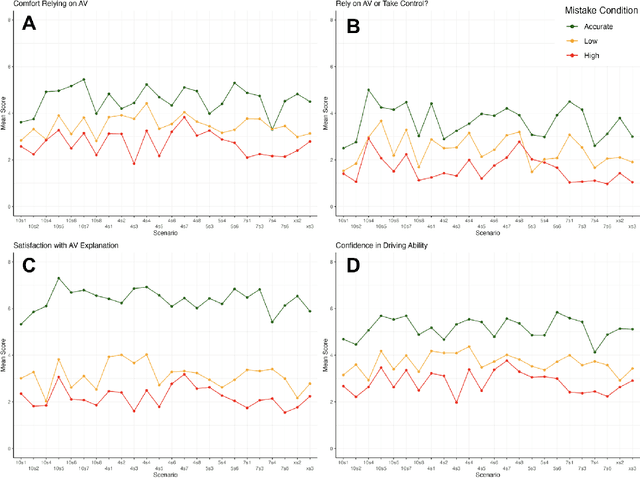
Explanations for autonomous vehicle (AV) decisions may build trust, however, explanations can contain errors. In a simulated driving study (n = 232), we tested how AV explanation errors, driving context characteristics (perceived harm and driving difficulty), and personal traits (prior trust and expertise) affected a passenger's comfort in relying on an AV, preference for control, confidence in the AV's ability, and explanation satisfaction. Errors negatively affected all outcomes. Surprisingly, despite identical driving, explanation errors reduced ratings of the AV's driving ability. Severity and potential harm amplified the negative impact of errors. Contextual harm and driving difficulty directly impacted outcome ratings and influenced the relationship between errors and outcomes. Prior trust and expertise were positively associated with outcome ratings. Results emphasize the need for accurate, contextually adaptive, and personalized AV explanations to foster trust, reliance, satisfaction, and confidence. We conclude with design, research, and deployment recommendations for trustworthy AV explanation systems.
Developing Situational Awareness for Joint Action with Autonomous Vehicles
Apr 17, 2024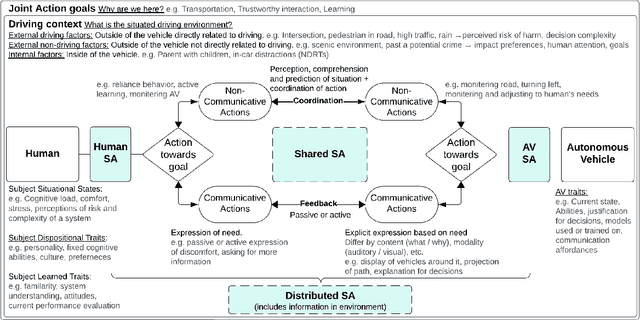
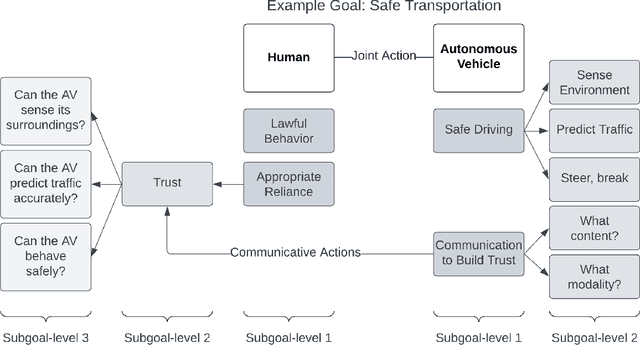
Unanswered questions about how human-AV interaction designers can support rider's informational needs hinders Autonomous Vehicles (AV) adoption. To achieve joint human-AV action goals - such as safe transportation, trust, or learning from an AV - sufficient situational awareness must be held by the human, AV, and human-AV system collectively. We present a systems-level framework that integrates cognitive theories of joint action and situational awareness as a means to tailor communications that meet the criteria necessary for goal success. This framework is based on four components of the shared situation: AV traits, action goals, subject-specific traits and states, and the situated driving context. AV communications should be tailored to these factors and be sensitive when they change. This framework can be useful for understanding individual, shared, and distributed human-AV situational awareness and designing for future AV communications that meet the informational needs and goals of diverse groups and in diverse driving contexts.
Explainable AI And Visual Reasoning: Insights From Radiology
Apr 06, 2023
Why do explainable AI (XAI) explanations in radiology, despite their promise of transparency, still fail to gain human trust? Current XAI approaches provide justification for predictions, however, these do not meet practitioners' needs. These XAI explanations lack intuitive coverage of the evidentiary basis for a given classification, posing a significant barrier to adoption. We posit that XAI explanations that mirror human processes of reasoning and justification with evidence may be more useful and trustworthy than traditional visual explanations like heat maps. Using a radiology case study, we demonstrate how radiology practitioners get other practitioners to see a diagnostic conclusion's validity. Machine-learned classifications lack this evidentiary grounding and consequently fail to elicit trust and adoption by potential users. Insights from this study may generalize to guiding principles for human-centered explanation design based on human reasoning and justification of evidence.
Visual scoping operations for physical assembly
Jun 10, 2021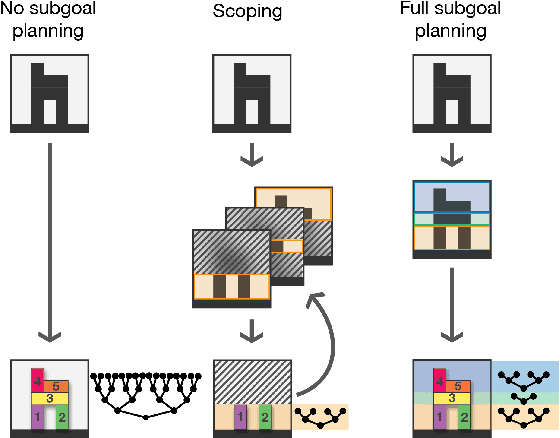
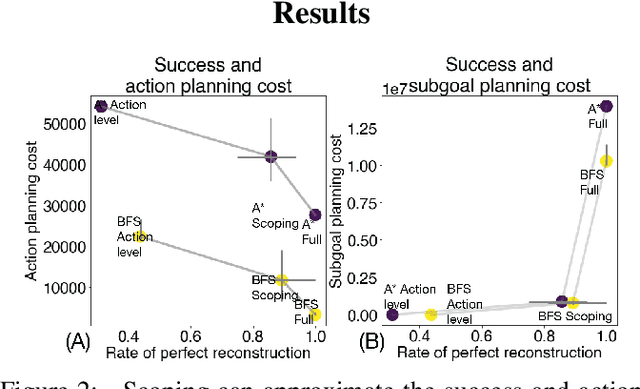
Planning is hard. The use of subgoals can make planning more tractable, but selecting these subgoals is computationally costly. What algorithms might enable us to reap the benefits of planning using subgoals while minimizing the computational overhead of selecting them? We propose visual scoping, a strategy that interleaves planning and acting by alternately defining a spatial region as the next subgoal and selecting actions to achieve it. We evaluated our visual scoping algorithm on a variety of physical assembly problems against two baselines: planning all subgoals in advance and planning without subgoals. We found that visual scoping achieves comparable task performance to the subgoal planner while requiring only a fraction of the total computational cost. Together, these results contribute to our understanding of how humans might make efficient use of cognitive resources to solve complex planning problems.