 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCitySim: A Drone-Based Vehicle Trajectory Dataset for Safety Oriented Research and Digital Twins
Aug 23, 2022

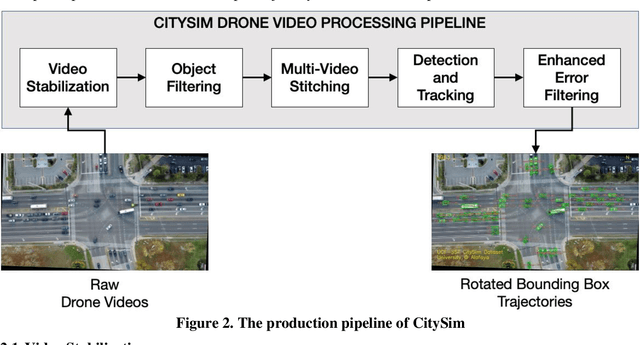
The development of safety-oriented research ideas and applications requires fine-grained vehicle trajectory data that not only has high accuracy but also captures a substantial number of critical safety events. This paper introduces the CitySim Dataset, which was devised with a core objective of facilitating safety-based research and applications. CitySim has vehicle trajectories extracted from 1140-minutes of drone videos recorded at 12 different locations. It covers a variety of road geometries including freeway basic segments, weaving segments, expressway merge/diverge segments, signalized intersections, stop-controlled intersections, and intersections without sign/signal control. CitySim trajectories were generated through a five-step procedure which ensured the trajectory accuracy. Furthermore, the dataset provides vehicle rotated bounding box information which is demonstrated to improve safety evaluation. Compared to other video-based trajectory datasets, the CitySim Dataset has significantly more critical safety events with higher severity including cut-in, merge, and diverge events. In addition, CitySim facilitates research towards digital twin applications by providing relevant assets like the recording locations'3D base maps and signal timings. These features enable more comprehensive conditions for safety research and applications such as autonomous vehicle safety and location-based safety analysis. The dataset is available online at https://github.com/ozheng1993/UCF-SST-CitySim-Dataset.