 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR2SNet: Scalable Domain Adaptation for Object Detection in Cloud-Based Robots Ecosystems via Proposal Refinement
Mar 21, 2024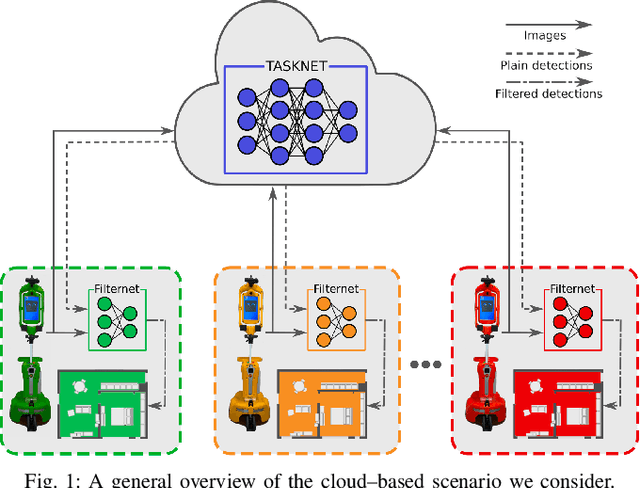
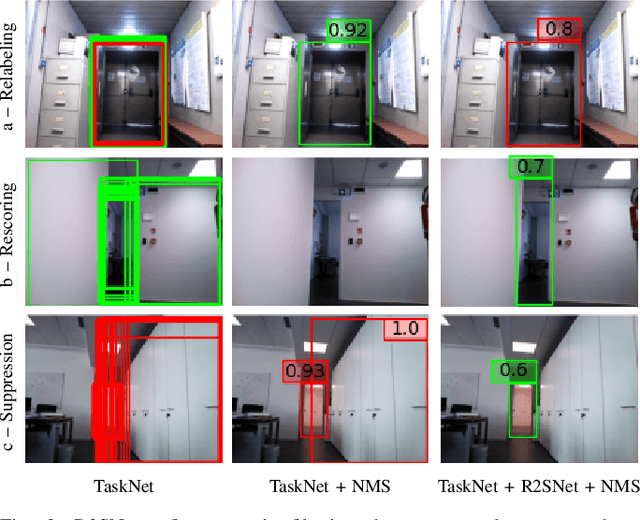
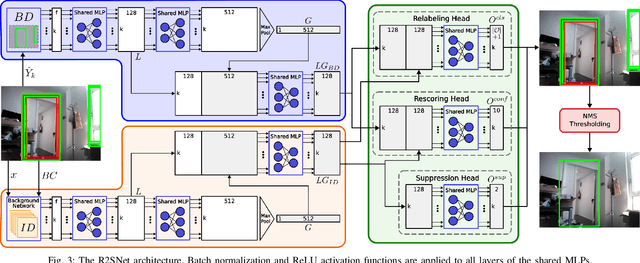
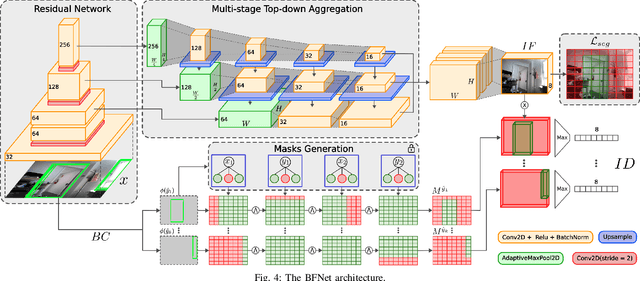
We introduce a novel approach for scalable domain adaptation in cloud robotics scenarios where robots rely on third-party AI inference services powered by large pre-trained deep neural networks. Our method is based on a downstream proposal-refinement stage running locally on the robots, exploiting a new lightweight DNN architecture, R2SNet. This architecture aims to mitigate performance degradation from domain shifts by adapting the object detection process to the target environment, focusing on relabeling, rescoring, and suppression of bounding-box proposals. Our method allows for local execution on robots, addressing the scalability challenges of domain adaptation without incurring significant computational costs. Real-world results on mobile service robots performing door detection show the effectiveness of the proposed method in achieving scalable domain adaptation.
Development and Adaptation of Robotic Vision in the Real-World: the Challenge of Door Detection
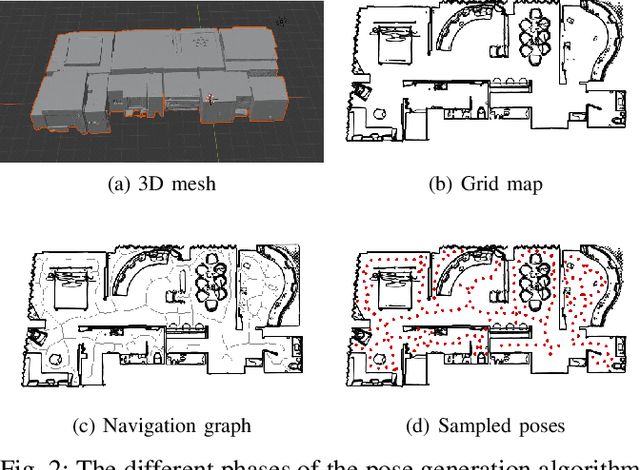
Jan 31, 2024Mobile service robots are increasingly prevalent in human-centric, real-world domains, operating autonomously in unconstrained indoor environments. In such a context, robotic vision plays a central role in enabling service robots to perceive high-level environmental features from visual observations. Despite the data-driven approaches based on deep learning push the boundaries of vision systems, applying these techniques to real-world robotic scenarios presents unique methodological challenges. Traditional models fail to represent the challenging perception constraints typical of service robots and must be adapted for the specific environment where robots finally operate. We propose a method leveraging photorealistic simulations that balances data quality and acquisition costs for synthesizing visual datasets from the robot perspective used to train deep architectures. Then, we show the benefits in qualifying a general detector for the target domain in which the robot is deployed, showing also the trade-off between the effort for obtaining new examples from such a setting and the performance gain. In our extensive experimental campaign, we focus on the door detection task (namely recognizing the presence and the traversability of doorways) that, in dynamic settings, is useful to infer the topology of the map. Our findings are validated in a real-world robot deployment, comparing prominent deep-learning models and demonstrating the effectiveness of our approach in practical settings.
Enhancing Door Detection for Autonomous Mobile Robots with Environment-Specific Data Collection
Mar 08, 2022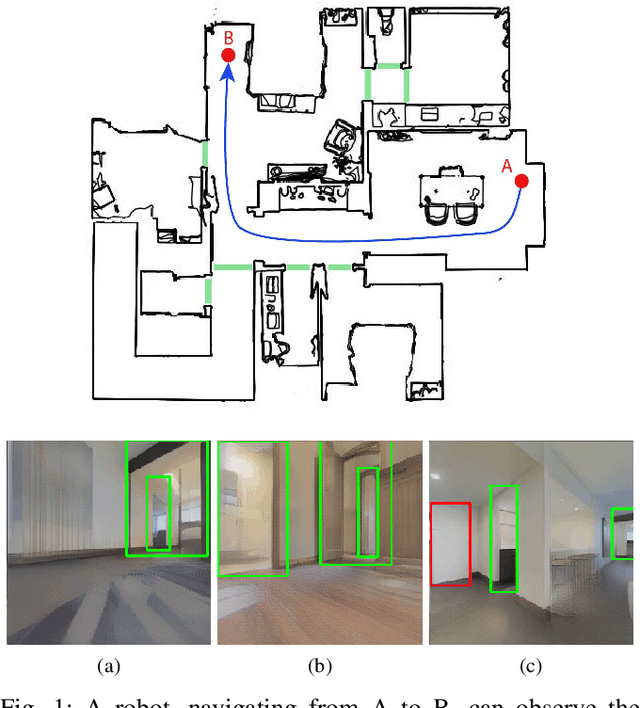
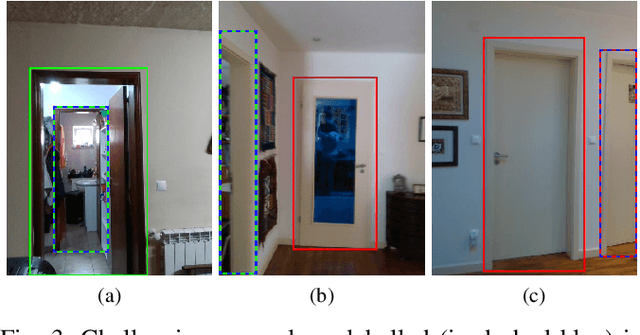
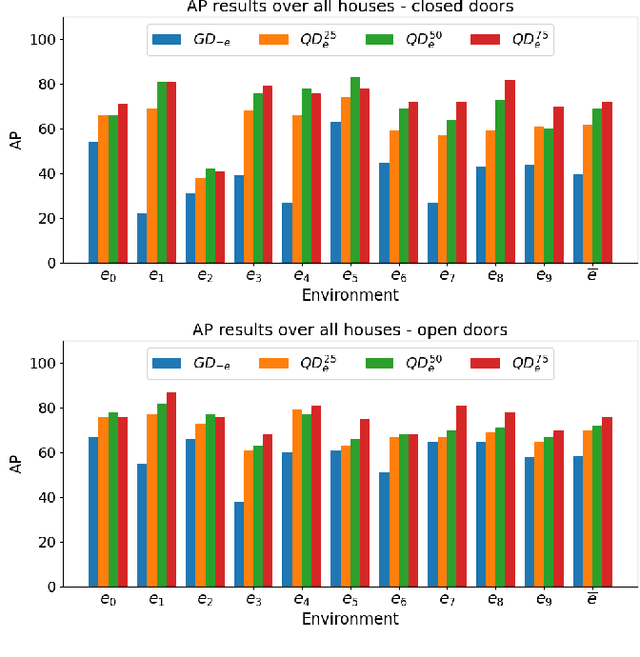
Door detection represents a fundamental capability for autonomous mobile robots employed in tasks involving indoor navigation. Recognizing the presence of a door and its status (open or closed) can induce a remarkable impact on the navigation performance, especially for dynamic settings where doors can enable or disable passages, hence changing the actual topology of the map. In this work, we address the problem of building a door detector module for an autonomous mobile robot deployed in a long-term scenario, namely operating in the same environment for a long time, thus observing the same set of doors from different points of view. First, we show how the mainstream approach for door detection, based on object recognition, falls short in considering the constrained perception setup typical of a mobile robot. Hence, we devise a method to build a dataset of images taken from a robot's perspective and we exploit it to obtain a door detector based on an established deep-learning object-recognition method. We then exploit the long-term assumption of our scenario to qualify the model on the robot working environment via fine-tuning with additional images acquired in the deployment environment. Our experimental analysis shows how this method can achieve good performance and highlights a trade-off between costs and benefits of the fine-tuning approach.