 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR2SNet: Scalable Domain Adaptation for Object Detection in Cloud-Based Robots Ecosystems via Proposal Refinement
Paper and Code
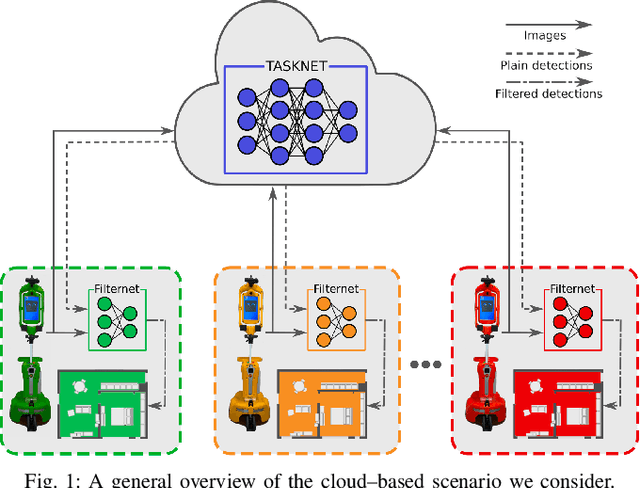
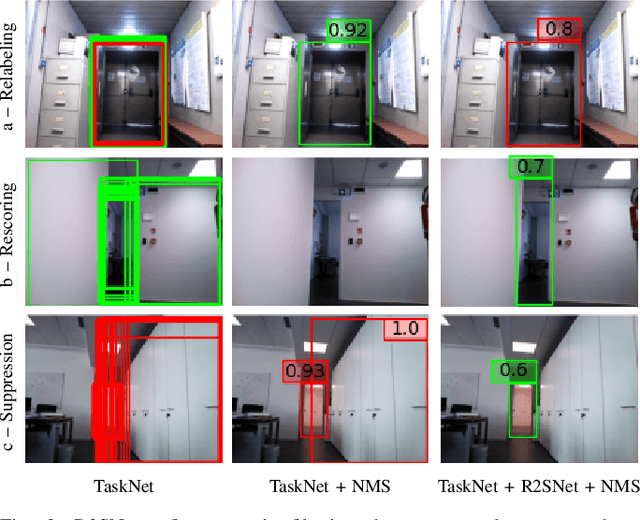
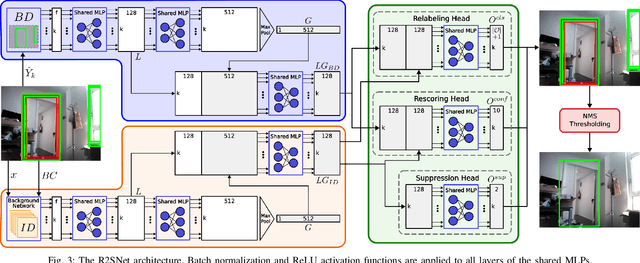
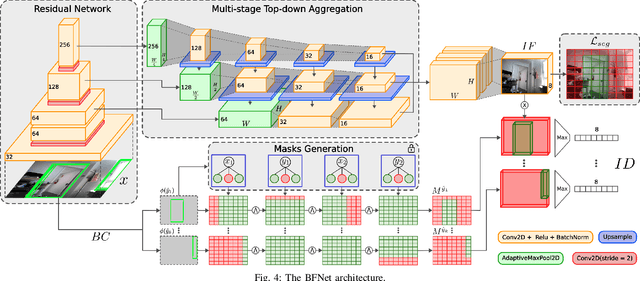
We introduce a novel approach for scalable domain adaptation in cloud robotics scenarios where robots rely on third-party AI inference services powered by large pre-trained deep neural networks. Our method is based on a downstream proposal-refinement stage running locally on the robots, exploiting a new lightweight DNN architecture, R2SNet. This architecture aims to mitigate performance degradation from domain shifts by adapting the object detection process to the target environment, focusing on relabeling, rescoring, and suppression of bounding-box proposals. Our method allows for local execution on robots, addressing the scalability challenges of domain adaptation without incurring significant computational costs. Real-world results on mobile service robots performing door detection show the effectiveness of the proposed method in achieving scalable domain adaptation.