 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZ-Merge: Multi-Agent Reinforcement Learning for On-Ramp Merging with Zone-Specific V2X Traffic Information
Nov 18, 2025Ramp merging is a critical and challenging task for autonomous vehicles (AVs), particularly in mixed traffic environments with human-driven vehicles (HVs). Existing approaches typically rely on either lane-changing or inter-vehicle gap creation strategies based solely on local or neighboring information, often leading to suboptimal performance in terms of safety and traffic efficiency. In this paper, we present a V2X (vehicle-to-everything communication)-assisted Multiagent Reinforcement Learning (MARL) framework for on-ramp merging that effectively coordinates the complex interplay between lane-changing and inter-vehicle gap adaptation strategies by utilizing zone-specific global information available from a roadside unit (RSU). The merging control problem is formulated as a Multiagent Partially Observable Markov Decision Process (MA-POMDP), where agents leverage both local and global observations through V2X communication. To support both discrete and continuous control decisions, we design a hybrid action space and adopt a parameterized deep Q-learning approach. Extensive simulations, integrating the SUMO traffic simulator and the MOSAIC V2X simulator, demonstrate that our framework significantly improves merging success rate, traffic efficiency, and road safety across diverse traffic scenarios.
SmartPathfinder: Pushing the Limits of Heuristic Solutions for Vehicle Routing Problem with Drones Using Reinforcement Learning
Apr 13, 2024The Vehicle Routing Problem with Drones (VRPD) seeks to optimize the routing paths for both trucks and drones, where the trucks are responsible for delivering parcels to customer locations, and the drones are dispatched from these trucks for parcel delivery, subsequently being retrieved by the trucks. Given the NP-Hard complexity of VRPD, numerous heuristic approaches have been introduced. However, improving solution quality and reducing computation time remain significant challenges. In this paper, we conduct a comprehensive examination of heuristic methods designed for solving VRPD, distilling and standardizing them into core elements. We then develop a novel reinforcement learning (RL) framework that is seamlessly integrated with the heuristic solution components, establishing a set of universal principles for incorporating the RL framework with heuristic strategies in an aim to improve both the solution quality and computation speed. This integration has been applied to a state-of-the-art heuristic solution for VRPD, showcasing the substantial benefits of incorporating the RL framework. Our evaluation results demonstrated that the heuristic solution incorporated with our RL framework not only elevated the quality of solutions but also achieved rapid computation speeds, especially when dealing with extensive customer locations.
WatchPed: Pedestrian Crossing Intention Prediction Using Embedded Sensors of Smartwatch
Aug 15, 2022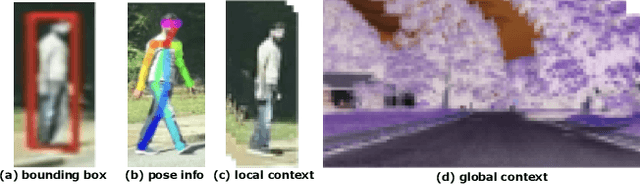

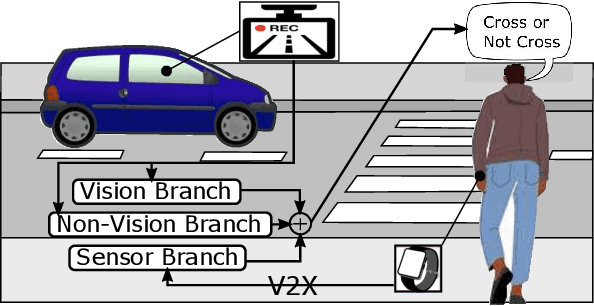
The pedestrian intention prediction problem is to estimate whether or not the target pedestrian will cross the street. State-of-the-art approaches heavily rely on visual information collected with the front camera of the ego-vehicle to make a prediction of the pedestrian's intention. As such, the performance of existing methods significantly degrades when the visual information is not accurate, e.g., when the distance between the pedestrian and ego-vehicle is far, or the lighting conditions are not good enough. In this paper, we design, implement, and evaluate the first pedestrian intention prediction model based on integration of motion sensor data gathered with the smartwatch (or smartphone) of the pedestrian. A novel machine learning architecture is proposed to effectively incorporate the motion sensor data to reinforce the visual information to significantly improve the performance in adverse situations where the visual information may be unreliable. We also conduct a large-scale data collection and present the first pedestrian intention prediction dataset integrated with time-synchronized motion sensor data. The dataset consists of a total of 128 video clips with different distances and varying levels of lighting conditions. We trained our model using the widely-used JAAD and our own datasets and compare the performance with a state-of-the-art model. The results demonstrate that our model outperforms the state-of-the-art method particularly when the distance to the pedestrian is far (over 70m), and the lighting conditions are not sufficient.
LSTM-Based Adaptive Vehicle Position Control for Dynamic Wireless Charging
May 21, 2022
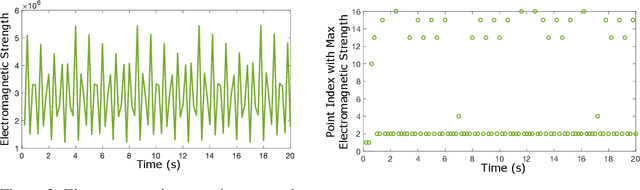
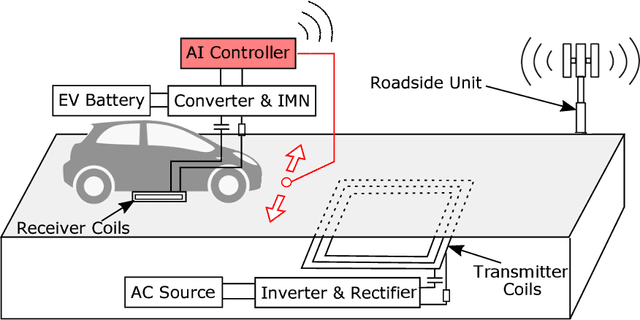
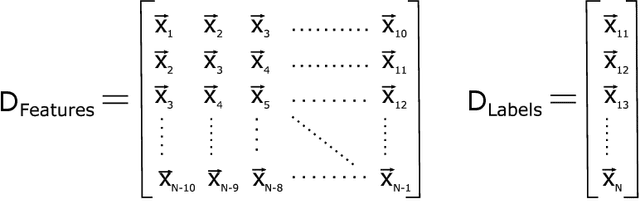
Dynamic wireless charging (DWC) is an emerging technology that allows electric vehicles (EVs) to be wirelessly charged while in motion. It is gaining significant momentum as it can potentially address the range limitation issue for EVs. However, due to significant power loss caused by wireless power transfer, improving charging efficiency remains as a major challenge for DWC systems. This paper presents the first LSTM-based vehicle motion control system for DWC designed to maximize charging efficiency. The dynamics of the electromagnetic field generated by the transmitter coils of a DWC system are modeled based on a multi-layer LSTM. The LSTM model is used to make a prediction of the lateral position where the electromagnetic strength is expected to be maximal and to control the EV motion accordingly to optimize charging efficiency. Simulations were conducted to demonstrate that our LSTM-based approach achieves by up to 162.3% higher charging efficiency compared with state-of-the-art vehicle motion control systems focused on keeping an EV in the center of lane.
UBAT: On Jointly Optimizing UAV Trajectories and Placement of Battery Swap Stations
Oct 10, 2019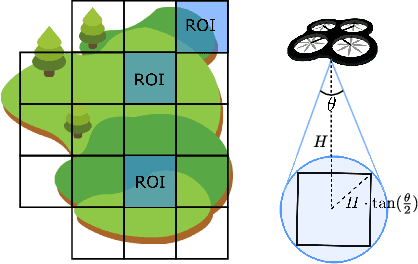
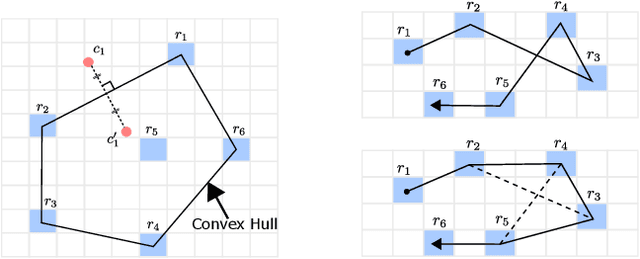
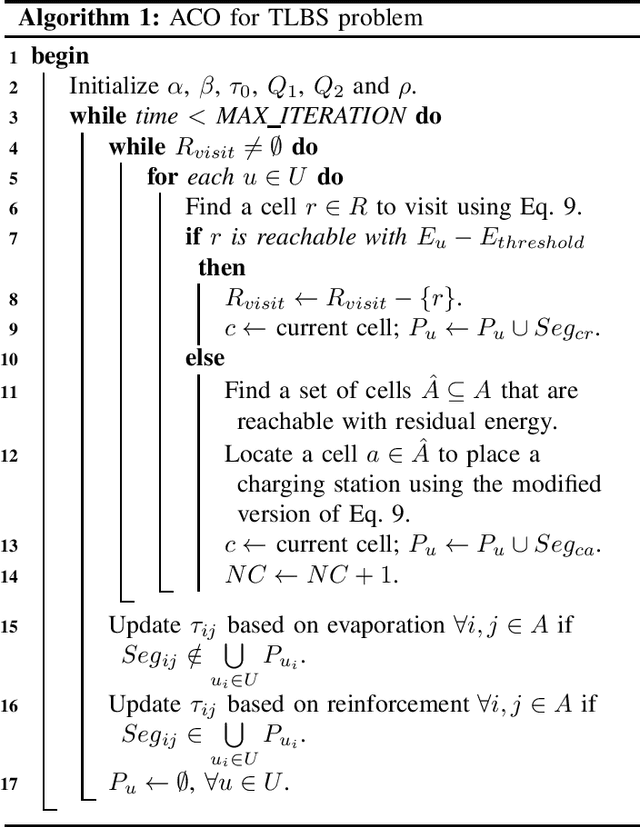

Unmanned aerial vehicles (UAVs) have been widely used in many applications. The limited flight time of UAVs, however, still remains as a major challenge. Although numerous approaches have been developed to recharge the battery of UAVs effectively, little is known about optimal methodologies to deploy charging stations. In this paper, we address the charging station deployment problem with an aim to find the optimal number and locations of charging stations such that the system performance is maximized. We show that the problem is NP-Hard and propose UBAT, a heuristic framework based on the ant colony optimization (ACO) to solve the problem. Additionally, a suite of algorithms are designed to enhance the execution time and the quality of the solutions for UBAT. Through extensive simulations, we demonstrate that UBAT effectively performs multi-objective optimization of generation of UAV trajectories and placement of charging stations that are within 8.3% and 7.3% of the true optimal solutions, respectively.
DeepWiTraffic: Low Cost WiFi-Based Traffic Monitoring System Using Deep Learning
Dec 19, 2018
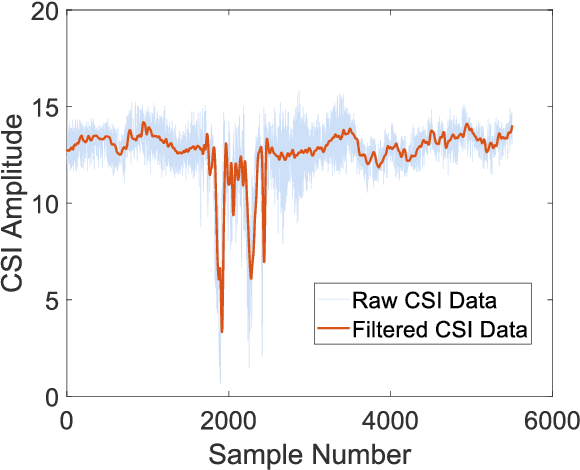
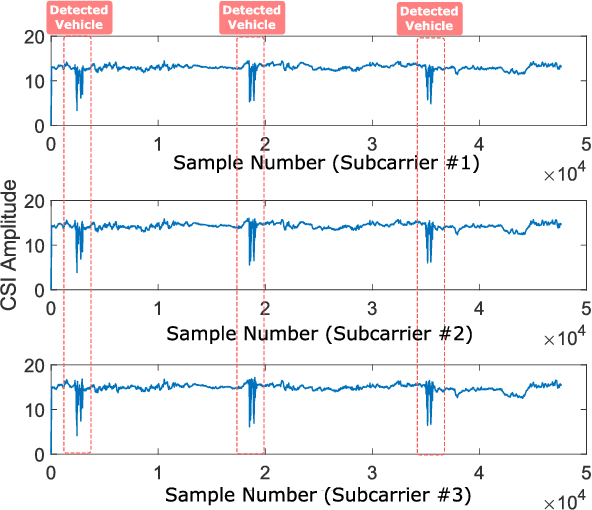
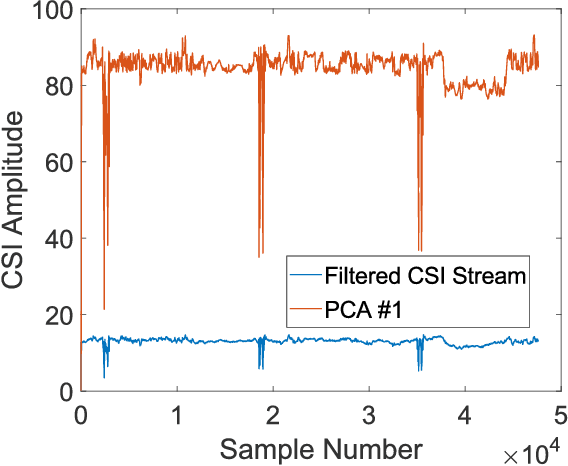
A traffic monitoring system (TMS) is an integral part of Intelligent Transportation Systems (ITS) for traffic analysis and planning. This paper addresses the endemic cost issue of deploying a large number of TMSs to cover huge miles of two-lane rural highways (119,247 miles in U.S.). A low-cost and portable TMS called DeepWiTraffic based on COTs WiFi devices and deep learning is proposed. DeepWiTraffic enables accurate vehicle detection and classification by exploiting the unique WiFi Channel State Information (CSI) of passing vehicles. Spatial and temporal correlations of preprocessed CSI amplitude and phase data are identified and analyzed using deep learning to classify vehicles into five different types: motorcycle, passenger vehicle, SUV, pickup truck, and large truck. A large amount of CSI data of passing vehicles and the corresponding ground truth video data are collected for about 120 hours to validate the effectiveness of DeepWiTraffic. The results show that the average detection accuracy of 99.4%, and the average classification accuracy of 91.1% (Motorcycle: 97.2%, Passenger Car: 91.1%, SUV:83.8%, Pickup Truck: 83.3%, and Large Truck: 99.7%) are achieved at a very small cost of about $1,000.