 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmartPathfinder: Pushing the Limits of Heuristic Solutions for Vehicle Routing Problem with Drones Using Reinforcement Learning
Apr 13, 2024The Vehicle Routing Problem with Drones (VRPD) seeks to optimize the routing paths for both trucks and drones, where the trucks are responsible for delivering parcels to customer locations, and the drones are dispatched from these trucks for parcel delivery, subsequently being retrieved by the trucks. Given the NP-Hard complexity of VRPD, numerous heuristic approaches have been introduced. However, improving solution quality and reducing computation time remain significant challenges. In this paper, we conduct a comprehensive examination of heuristic methods designed for solving VRPD, distilling and standardizing them into core elements. We then develop a novel reinforcement learning (RL) framework that is seamlessly integrated with the heuristic solution components, establishing a set of universal principles for incorporating the RL framework with heuristic strategies in an aim to improve both the solution quality and computation speed. This integration has been applied to a state-of-the-art heuristic solution for VRPD, showcasing the substantial benefits of incorporating the RL framework. Our evaluation results demonstrated that the heuristic solution incorporated with our RL framework not only elevated the quality of solutions but also achieved rapid computation speeds, especially when dealing with extensive customer locations.
WatchPed: Pedestrian Crossing Intention Prediction Using Embedded Sensors of Smartwatch
Aug 15, 2022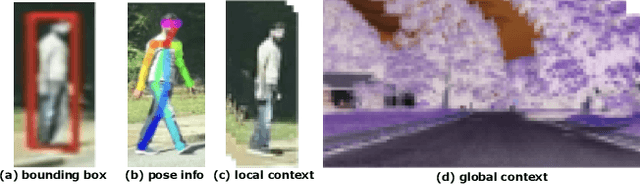

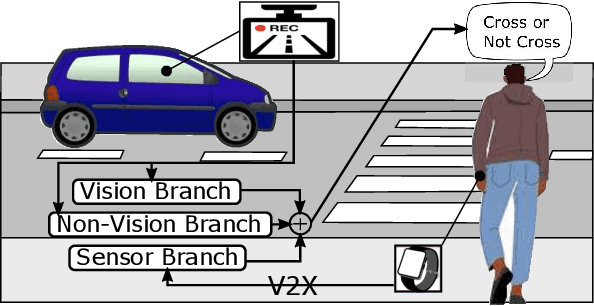
The pedestrian intention prediction problem is to estimate whether or not the target pedestrian will cross the street. State-of-the-art approaches heavily rely on visual information collected with the front camera of the ego-vehicle to make a prediction of the pedestrian's intention. As such, the performance of existing methods significantly degrades when the visual information is not accurate, e.g., when the distance between the pedestrian and ego-vehicle is far, or the lighting conditions are not good enough. In this paper, we design, implement, and evaluate the first pedestrian intention prediction model based on integration of motion sensor data gathered with the smartwatch (or smartphone) of the pedestrian. A novel machine learning architecture is proposed to effectively incorporate the motion sensor data to reinforce the visual information to significantly improve the performance in adverse situations where the visual information may be unreliable. We also conduct a large-scale data collection and present the first pedestrian intention prediction dataset integrated with time-synchronized motion sensor data. The dataset consists of a total of 128 video clips with different distances and varying levels of lighting conditions. We trained our model using the widely-used JAAD and our own datasets and compare the performance with a state-of-the-art model. The results demonstrate that our model outperforms the state-of-the-art method particularly when the distance to the pedestrian is far (over 70m), and the lighting conditions are not sufficient.