 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRESTRAIN: Reinforcement Learning-Based Secure Framework for Trigger-Action IoT Environment
Mar 12, 2025Internet of Things (IoT) platforms with trigger-action capability allow event conditions to trigger actions in IoT devices autonomously by creating a chain of interactions. Adversaries exploit this chain of interactions to maliciously inject fake event conditions into IoT hubs, triggering unauthorized actions on target IoT devices to implement remote injection attacks. Existing defense mechanisms focus mainly on the verification of event transactions using physical event fingerprints to enforce the security policies to block unsafe event transactions. These approaches are designed to provide offline defense against injection attacks. The state-of-the-art online defense mechanisms offer real-time defense, but extensive reliability on the inference of attack impacts on the IoT network limits the generalization capability of these approaches. In this paper, we propose a platform-independent multi-agent online defense system, namely RESTRAIN, to counter remote injection attacks at runtime. RESTRAIN allows the defense agent to profile attack actions at runtime and leverages reinforcement learning to optimize a defense policy that complies with the security requirements of the IoT network. The experimental results show that the defense agent effectively takes real-time defense actions against complex and dynamic remote injection attacks and maximizes the security gain with minimal computational overhead.
Traffic Volume Prediction using Memory-Based Recurrent Neural Networks: A comparative analysis of LSTM and GRU
Mar 22, 2023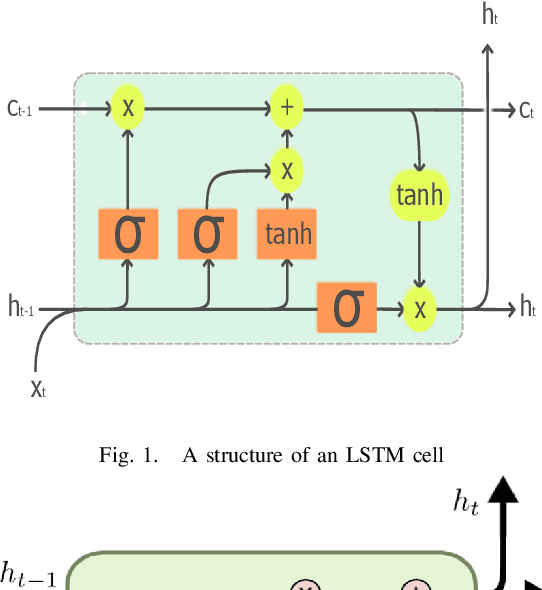
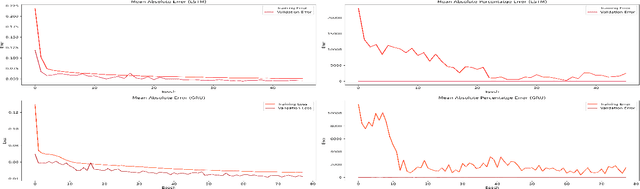
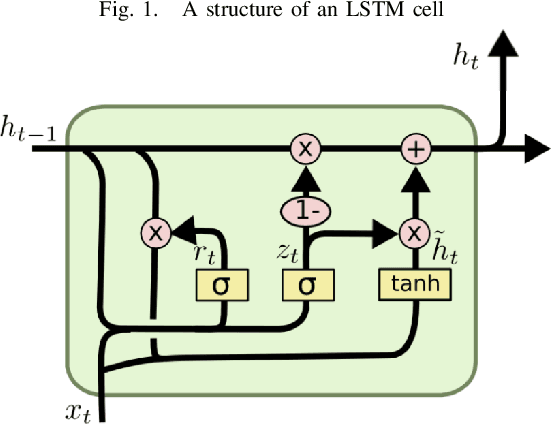
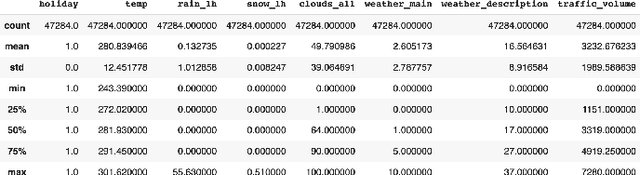
Predicting traffic volume in real-time can improve both traffic flow and road safety. A precise traffic volume forecast helps alert drivers to the flow of traffic along their preferred routes, preventing potential deadlock situations. Existing parametric models cannot reliably forecast traffic volume in dynamic and complex traffic conditions. Therefore, in order to evaluate and forecast the traffic volume for every given time step in a real-time manner, we develop non-linear memory-based deep neural network models. Our extensive experiments run on the Metro Interstate Traffic Volume dataset demonstrate the effectiveness of the proposed models in predicting traffic volume in highly dynamic and heterogeneous traffic environments.
LSTM-Based Adaptive Vehicle Position Control for Dynamic Wireless Charging
May 21, 2022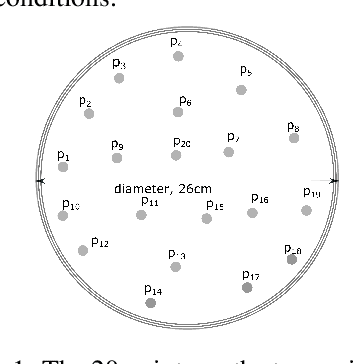
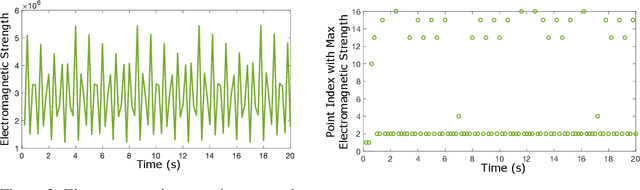
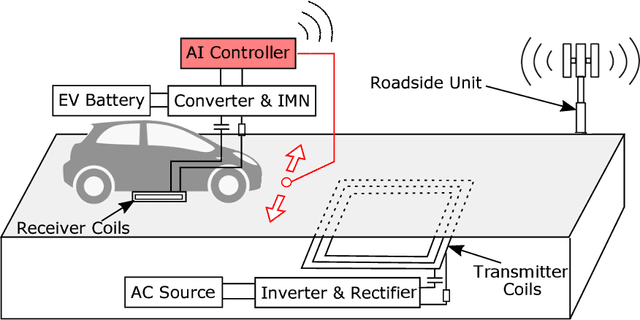
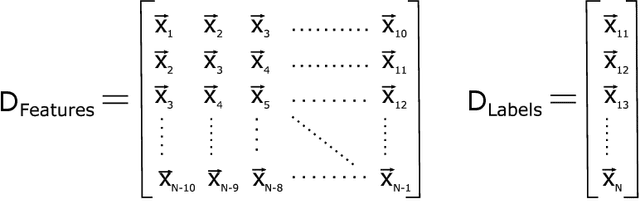
Dynamic wireless charging (DWC) is an emerging technology that allows electric vehicles (EVs) to be wirelessly charged while in motion. It is gaining significant momentum as it can potentially address the range limitation issue for EVs. However, due to significant power loss caused by wireless power transfer, improving charging efficiency remains as a major challenge for DWC systems. This paper presents the first LSTM-based vehicle motion control system for DWC designed to maximize charging efficiency. The dynamics of the electromagnetic field generated by the transmitter coils of a DWC system are modeled based on a multi-layer LSTM. The LSTM model is used to make a prediction of the lateral position where the electromagnetic strength is expected to be maximal and to control the EV motion accordingly to optimize charging efficiency. Simulations were conducted to demonstrate that our LSTM-based approach achieves by up to 162.3% higher charging efficiency compared with state-of-the-art vehicle motion control systems focused on keeping an EV in the center of lane.