 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLSTM-Based Adaptive Vehicle Position Control for Dynamic Wireless Charging
Paper and Code
May 21, 2022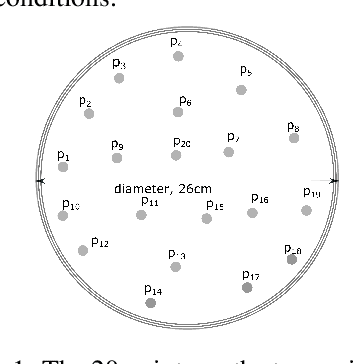
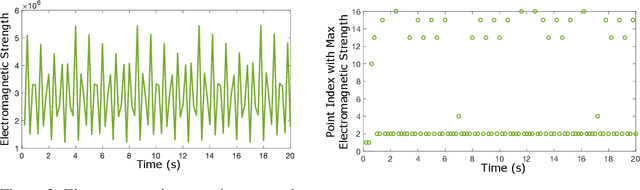
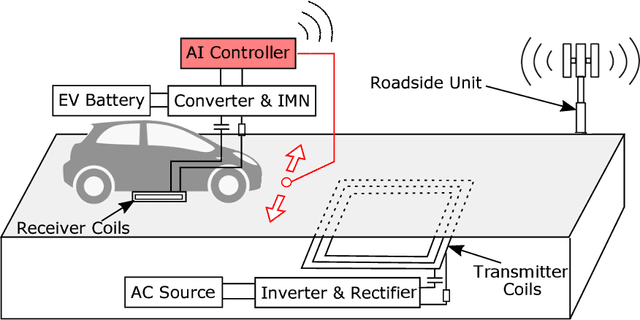
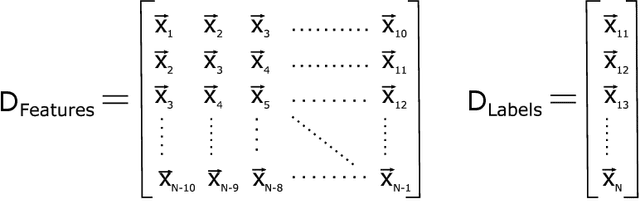
Dynamic wireless charging (DWC) is an emerging technology that allows electric vehicles (EVs) to be wirelessly charged while in motion. It is gaining significant momentum as it can potentially address the range limitation issue for EVs. However, due to significant power loss caused by wireless power transfer, improving charging efficiency remains as a major challenge for DWC systems. This paper presents the first LSTM-based vehicle motion control system for DWC designed to maximize charging efficiency. The dynamics of the electromagnetic field generated by the transmitter coils of a DWC system are modeled based on a multi-layer LSTM. The LSTM model is used to make a prediction of the lateral position where the electromagnetic strength is expected to be maximal and to control the EV motion accordingly to optimize charging efficiency. Simulations were conducted to demonstrate that our LSTM-based approach achieves by up to 162.3% higher charging efficiency compared with state-of-the-art vehicle motion control systems focused on keeping an EV in the center of lane.