 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalog Spiking Neuron in CMOS 28 nm Towards Large-Scale Neuromorphic Processors
Aug 14, 2024The computational complexity of deep learning algorithms has given rise to significant speed and memory challenges for the execution hardware. In energy-limited portable devices, highly efficient processing platforms are indispensable for reproducing the prowess afforded by much bulkier processing platforms. In this work, we present a low-power Leaky Integrate-and-Fire (LIF) neuron design fabricated in TSMC's 28 nm CMOS technology as proof of concept to build an energy-efficient mixed-signal Neuromorphic System-on-Chip (NeuroSoC). The fabricated neuron consumes 1.61 fJ/spike and occupies an active area of 34 $\mu m^{2}$, leading to a maximum spiking frequency of 300 kHz at 250 mV power supply. These performances are used in a software model to emulate the dynamics of a Spiking Neural Network (SNN). Employing supervised backpropagation and a surrogate gradient technique, the resulting accuracy on the MNIST dataset, using 4-bit post-training quantization stands at 82.5\%. The approach underscores the potential of such ASIC implementation of quantized SNNs to deliver high-performance, energy-efficient solutions to various embedded machine-learning applications.
Matching Problems to Solutions: An Explainable Way of Solving Machine Learning Problems
Jun 21, 2024



Domain experts from all fields are called upon, working with data scientists, to explore the use of ML techniques to solve their problems. Starting from a domain problem/question, ML-based problem-solving typically involves three steps: (1) formulating the business problem (problem domain) as a data analysis problem (solution domain), (2) sketching a high-level ML-based solution pattern, given the domain requirements and the properties of the available data, and (3) designing and refining the different components of the solution pattern. There has to be a substantial body of ML problem solving knowledge that ML researchers agree on, and that ML practitioners routinely apply to solve the most common problems. Our work deals with capturing this body of knowledge, and embodying it in a ML problem solving workbench to helps domain specialists who are not ML experts to explore the ML solution space. This paper focuses on: 1) the representation of domain problems, ML problems, and the main ML solution artefacts, and 2) a heuristic matching function that helps identify the ML algorithm family that is most appropriate for the domain problem at hand, given the domain (expert) requirements, and the characteristics of the training data. We review related work and outline our strategy for validating the workbench
Towards Robust and Interpretable EMG-based Hand Gesture Recognition using Deep Metric Meta Learning
Apr 17, 2024



Current electromyography (EMG) pattern recognition (PR) models have been shown to generalize poorly in unconstrained environments, setting back their adoption in applications such as hand gesture control. This problem is often due to limited training data, exacerbated by the use of supervised classification frameworks that are known to be suboptimal in such settings. In this work, we propose a shift to deep metric-based meta-learning in EMG PR to supervise the creation of meaningful and interpretable representations. We use a Siamese Deep Convolutional Neural Network (SDCNN) and contrastive triplet loss to learn an EMG feature embedding space that captures the distribution of the different classes. A nearest-centroid approach is subsequently employed for inference, relying on how closely a test sample aligns with the established data distributions. We derive a robust class proximity-based confidence estimator that leads to a better rejection of incorrect decisions, i.e. false positives, especially when operating beyond the training data domain. We show our approach's efficacy by testing the trained SDCNN's predictions and confidence estimations on unseen data, both in and out of the training domain. The evaluation metrics include the accuracy-rejection curve and the Kullback-Leibler divergence between the confidence distributions of accurate and inaccurate predictions. Outperforming comparable models on both metrics, our results demonstrate that the proposed meta-learning approach improves the classifier's precision in active decisions (after rejection), thus leading to better generalization and applicability.
A Flexible and Modular Body-Machine Interface for Individuals Living with Severe Disabilities
Jul 29, 2020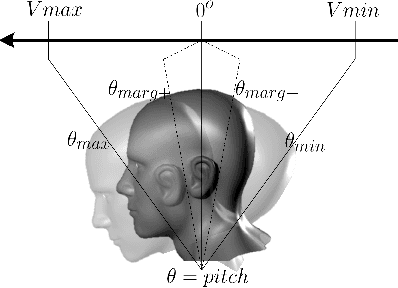
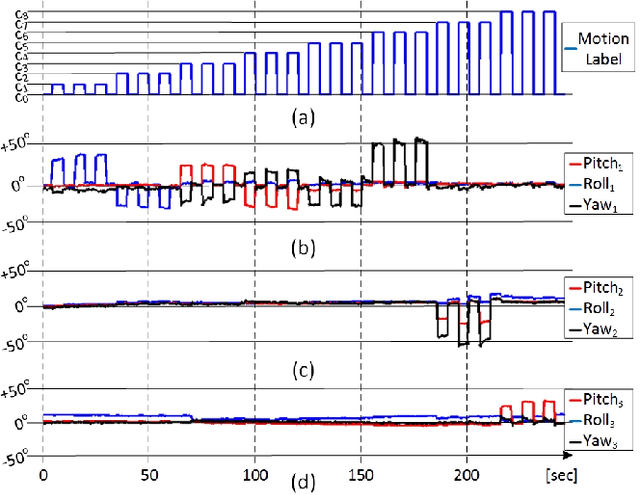
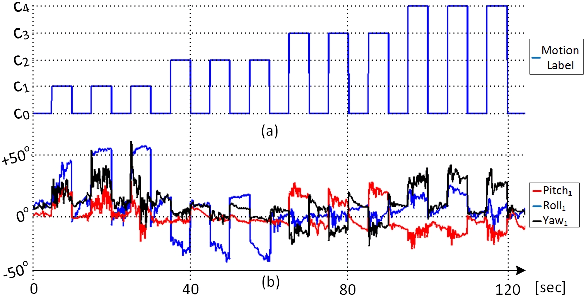
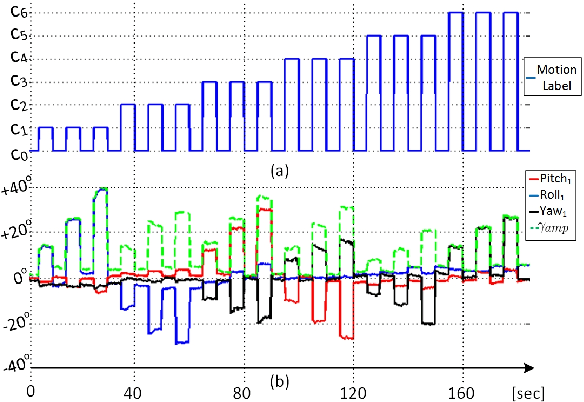
This paper presents a control interface to translate the residual body motions of individuals living with severe disabilities, into control commands for body-machine interaction. A custom, wireless, wearable multi-sensor network is used to collect motion data from multiple points on the body in real-time. The solution proposed successfully leverage electromyography gesture recognition techniques for the recognition of inertial measurement units-based commands (IMU), without the need for cumbersome and noisy surface electrodes. Motion pattern recognition is performed using a computationally inexpensive classifier (Linear Discriminant Analysis) so that the solution can be deployed onto lightweight embedded platforms. Five participants (three able-bodied and two living with upper-body disabilities) presenting different motion limitations (e.g. spasms, reduced motion range) were recruited. They were asked to perform up to 9 different motion classes, including head, shoulder, finger, and foot motions, with respect to their residual functional capacities. The measured prediction performances show an average accuracy of 99.96% for able-bodied individuals and 91.66% for participants with upper-body disabilities. The recorded dataset has also been made available online to the research community. Proof of concept for the real-time use of the system is given through an assembly task replicating activities of daily living using the JACO arm from Kinova Robotics.