 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFSMDet: Vision-guided feature diffusion for fully sparse 3D detector
Sep 11, 2024Fully sparse 3D detection has attracted an increasing interest in the recent years. However, the sparsity of the features in these frameworks challenges the generation of proposals because of the limited diffusion process. In addition, the quest for efficiency has led to only few work on vision-assisted fully sparse models. In this paper, we propose FSMDet (Fully Sparse Multi-modal Detection), which use visual information to guide the LiDAR feature diffusion process while still maintaining the efficiency of the pipeline. Specifically, most of fully sparse works focus on complex customized center fusion diffusion/regression operators. However, we observed that if the adequate object completion is performed, even the simplest interpolation operator leads to satisfactory results. Inspired by this observation, we split the vision-guided diffusion process into two modules: a Shape Recover Layer (SRLayer) and a Self Diffusion Layer (SDLayer). The former uses RGB information to recover the shape of the visible part of an object, and the latter uses a visual prior to further spread the features to the center region. Experiments demonstrate that our approach successfully improves the performance of previous fully sparse models that use LiDAR only and reaches SOTA performance in multimodal models. At the same time, thanks to the sparse architecture, our method can be up to 5 times more efficient than previous SOTA methods in the inference process.
Modeling of Pruning Techniques for Deep Neural Networks Simplification
Jan 13, 2020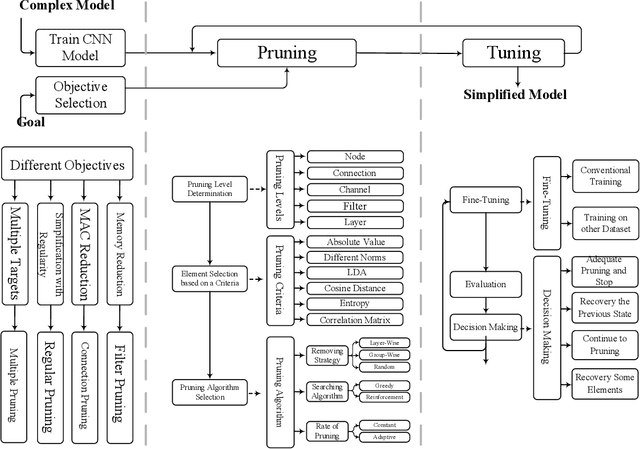
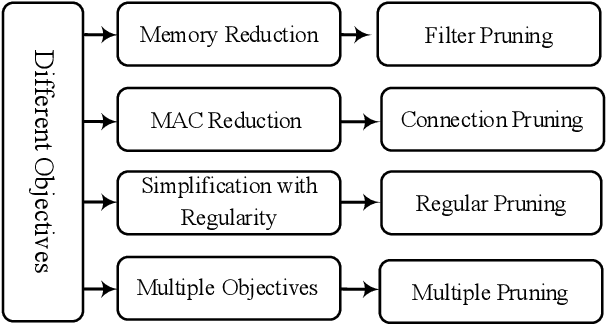
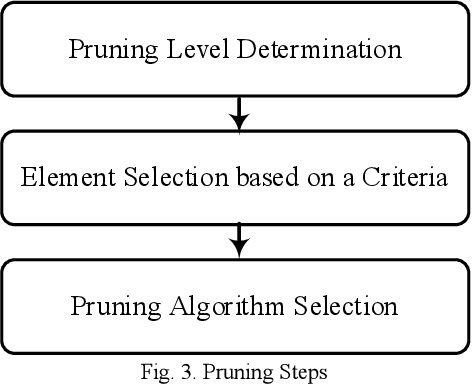
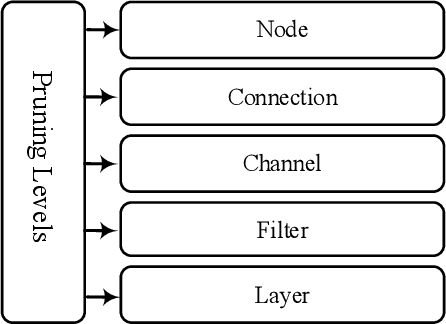
Convolutional Neural Networks (CNNs) suffer from different issues, such as computational complexity and the number of parameters. In recent years pruning techniques are employed to reduce the number of operations and model size in CNNs. Different pruning methods are proposed, which are based on pruning the connections, channels, and filters. Various techniques and tricks accompany pruning methods, and there is not a unifying framework to model all the pruning methods. In this paper pruning methods are investigated, and a general model which is contained the majority of pruning techniques is proposed. The advantages and disadvantages of the pruning methods can be identified, and all of them can be summarized under this model. The final goal of this model is to provide a general approach for all of the pruning methods with different structures and applications.