 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Adaptive Motion Planning with Nonlinear Model Predictive Control for Safety-Critical Collaborative Loco-Manipulation
Nov 16, 2024



As legged robots take on roles in industrial and autonomous construction, collaborative loco-manipulation is crucial for handling large and heavy objects that exceed the capabilities of a single robot. However, ensuring the safety of these multi-robot tasks is essential to prevent accidents and guarantee reliable operation. This paper presents a hierarchical control system for object manipulation using a team of quadrupedal robots. The combination of the motion planner and the decentralized locomotion controller in a hierarchical structure enables safe, adaptive planning for teams in complex scenarios. A high-level nonlinear model predictive control planner generates collision-free paths by incorporating control barrier functions, accounting for static and dynamic obstacles. This process involves calculating contact points and forces while adapting to unknown objects and terrain properties. The decentralized loco-manipulation controller then ensures each robot maintains stable locomotion and manipulation based on the planner's guidance. The effectiveness of our method is carefully examined in simulations under various conditions and validated in real-life setups with robot hardware. By modifying the object's configuration, the robot team can maneuver unknown objects through an environment containing both static and dynamic obstacles. We have made our code publicly available in an open-source repository at \url{https://github.com/DRCL-USC/collaborative_loco_manipulation}.
Safety-critical Motion Planning for Collaborative Legged Loco-Manipulation over Discrete Terrain
Oct 14, 2024
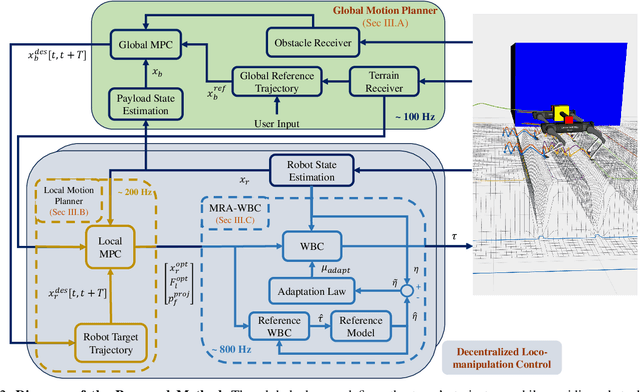
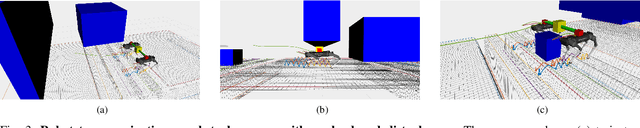
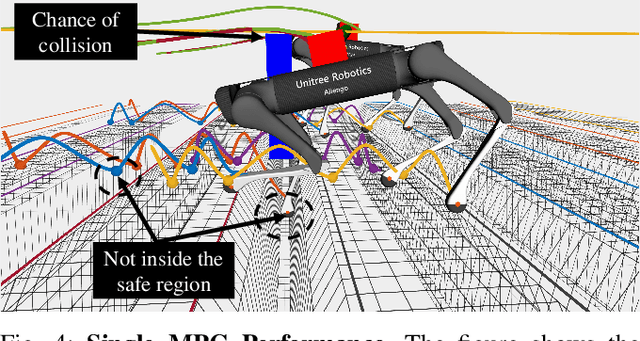
As legged robots are deployed in industrial and autonomous construction tasks requiring collaborative manipulation, they must handle object manipulation while maintaining stable locomotion. The challenge intensifies in real-world environments, where they should traverse discrete terrain, avoid obstacles, and coordinate with other robots for safe loco-manipulation. This work addresses safe motion planning for collaborative manipulation of an unknown payload on discrete terrain while avoiding obstacles. Our approach uses two sets of model predictive controllers (MPCs) as motion planners: a global MPC generates a safe trajectory for the team with obstacle avoidance, while decentralized MPCs for each robot ensure safe footholds on discrete terrain as they follow the global trajectory. A model reference adaptive whole-body controller (MRA-WBC) then tracks the desired path, compensating for model uncertainties from the unknown payload. We validated our method in simulation and hardware on a team of Unitree robots. The results demonstrate that our approach successfully guides the team through obstacle courses, requiring planar positioning and height adjustments, and all happening on discrete terrain such as stepping stones.
Adaptive Force-Based Control of Dynamic Legged Locomotion over Uneven Terrain
Jul 08, 2023Agile-legged robots have proven to be highly effective in navigating and performing tasks in complex and challenging environments, including disaster zones and industrial settings. However, these applications normally require the capability of carrying heavy loads while maintaining dynamic motion. Therefore, this paper presents a novel methodology for incorporating adaptive control into a force-based control system. Recent advancements in the control of quadruped robots show that force control can effectively realize dynamic locomotion over rough terrain. By integrating adaptive control into the force-based controller, our proposed approach can maintain the advantages of the baseline framework while adapting to significant model uncertainties and unknown terrain impact models. Experimental validation was successfully conducted on the Unitree A1 robot. With our approach, the robot can carry heavy loads (up to 50% of its weight) while performing dynamic gaits such as fast trotting and bounding across uneven terrains.
Hierarchical Adaptive Control for Collaborative Manipulation of a Rigid Object by Quadrupedal Robots
Mar 12, 2023Despite the potential benefits of collaborative robots, effective manipulation tasks with quadruped robots remain difficult to realize. In this paper, we propose a hierarchical control system that can handle real-world collaborative manipulation tasks, including uncertainties arising from object properties, shape, and terrain. Our approach consists of three levels of controllers. Firstly, an adaptive controller computes the required force and moment for object manipulation without prior knowledge of the object's properties and terrain. The computed force and moment are then optimally distributed between the team of quadruped robots using a Quadratic Programming (QP)-based controller. This QP-based controller optimizes each robot's contact point location with the object while satisfying constraints associated with robot-object contact. Finally, a decentralized loco-manipulation controller is designed for each robot to apply manipulation force while maintaining the robot's stability. We successfully validated our approach in a high-fidelity simulation environment where a team of quadruped robots manipulated an unknown object weighing up to 18 kg on different terrains while following the desired trajectory.
Hierarchical Adaptive Loco-manipulation Control for Quadruped Robots
Sep 27, 2022



Legged robots have shown remarkable advantages in navigating uneven terrain. However, realizing effective locomotion and manipulation tasks on quadruped robots is still challenging. In addition, object and terrain parameters are generally unknown to the robot in these problems. Therefore, this paper proposes a hierarchical adaptive control framework that enables legged robots to perform loco-manipulation tasks without any given assumption on the object's mass, the friction coefficient, or the slope of the terrain. In our approach, we first present an adaptive manipulation control to regulate the contact force to manipulate an unknown object on unknown terrain. We then introduce a unified model predictive control (MPC) for loco-manipulation that takes into account the manipulation force in our robot dynamics. The proposed MPC framework thus can effectively regulate the interaction force between the robot and the object while keeping the robot balance. Experimental validation of our proposed approach is successfully conducted on a Unitree A1 robot, allowing it to manipulate an unknown time-varying load up to $7$ $kg$ ($60\%$ of the robot's weight). Moreover, our framework enables fast adaptation to unknown slopes (up to $20^\circ$) or different surfaces with different friction coefficients.
Adaptive Force-based Control for Legged Robots
Nov 12, 2020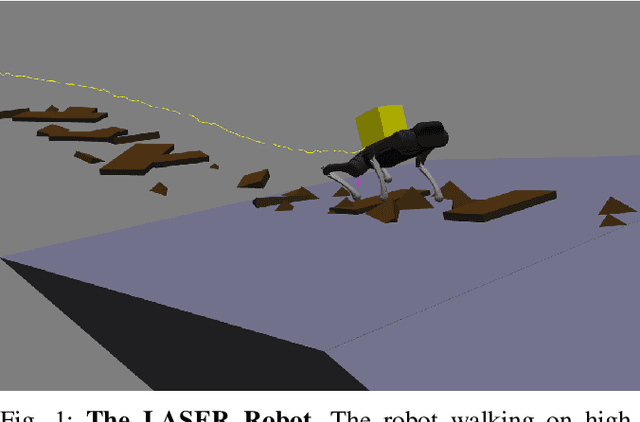
In this paper, we present a novel methodology to introduce adaptive control for force-based control systems, with application to legged robots. In our approach, the reference model is based on the quadratic program force control. We evaluate our proposed control design on a high-fidelity physical simulation of LASER, a dynamic quadruped robot. Our proposed method guarantees input-to-state stability and is successfully validated for the problem of quadruped robots walking on rough terrain while carrying unknown and time-varying loads.