 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-critical Motion Planning for Collaborative Legged Loco-Manipulation over Discrete Terrain
Paper and Code
Oct 14, 2024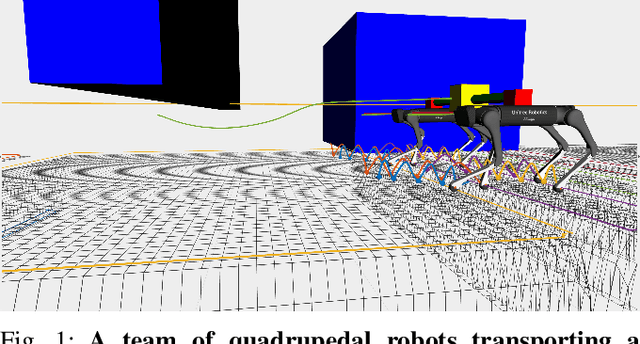
As legged robots are deployed in industrial and autonomous construction tasks requiring collaborative manipulation, they must handle object manipulation while maintaining stable locomotion. The challenge intensifies in real-world environments, where they should traverse discrete terrain, avoid obstacles, and coordinate with other robots for safe loco-manipulation. This work addresses safe motion planning for collaborative manipulation of an unknown payload on discrete terrain while avoiding obstacles. Our approach uses two sets of model predictive controllers (MPCs) as motion planners: a global MPC generates a safe trajectory for the team with obstacle avoidance, while decentralized MPCs for each robot ensure safe footholds on discrete terrain as they follow the global trajectory. A model reference adaptive whole-body controller (MRA-WBC) then tracks the desired path, compensating for model uncertainties from the unknown payload. We validated our method in simulation and hardware on a team of Unitree robots. The results demonstrate that our approach successfully guides the team through obstacle courses, requiring planar positioning and height adjustments, and all happening on discrete terrain such as stepping stones.