Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Force-based Control for Legged Robots
Paper and Code
Nov 12, 2020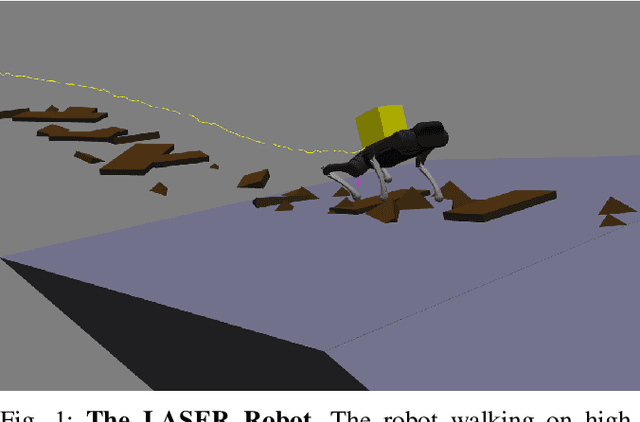
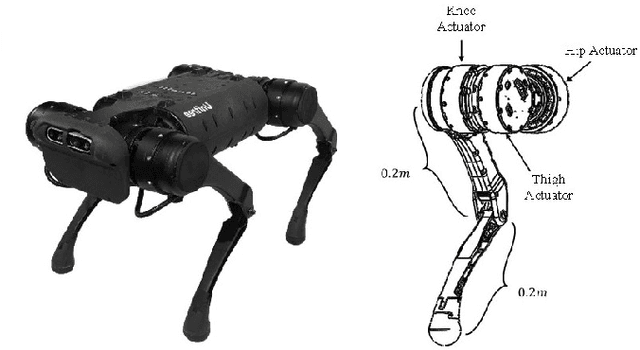
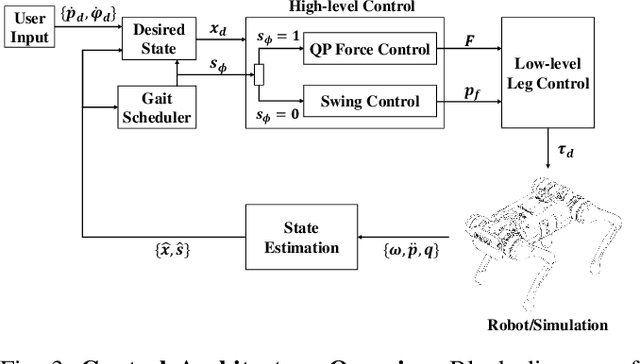
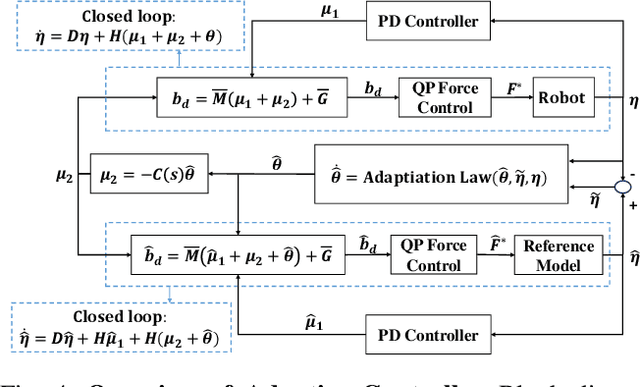
In this paper, we present a novel methodology to introduce adaptive control for force-based control systems, with application to legged robots. In our approach, the reference model is based on the quadratic program force control. We evaluate our proposed control design on a high-fidelity physical simulation of LASER, a dynamic quadruped robot. Our proposed method guarantees input-to-state stability and is successfully validated for the problem of quadruped robots walking on rough terrain while carrying unknown and time-varying loads.
View paper on