 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Grammatical Evolution for the Generation of Artificial Neural Networks
Aug 04, 2022This paper presents a novel method, called Modular Grammatical Evolution (MGE), towards validating the hypothesis that restricting the solution space of NeuroEvolution to modular and simple neural networks enables the efficient generation of smaller and more structured neural networks while providing acceptable (and in some cases superior) accuracy on large data sets. MGE also enhances the state-of-the-art Grammatical Evolution (GE) methods in two directions. First, MGE's representation is modular in that each individual has a set of genes, and each gene is mapped to a neuron by grammatical rules. Second, the proposed representation mitigates two important drawbacks of GE, namely the low scalability and weak locality of representation, towards generating modular and multi-layer networks with a high number of neurons. We define and evaluate five different forms of structures with and without modularity using MGE and find single-layer modules with no coupling more productive. Our experiments demonstrate that modularity helps in finding better neural networks faster. We have validated the proposed method using ten well-known classification benchmarks with different sizes, feature counts, and output class count. Our experimental results indicate that MGE provides superior accuracy with respect to existing NeuroEvolution methods and returns classifiers that are significantly simpler than other machine learning generated classifiers. Finally, we empirically demonstrate that MGE outperforms other GE methods in terms of locality and scalability properties.
EEPT: Early Discovery of Emerging Entities in Twitter with Semantic Similarity
Jul 06, 2022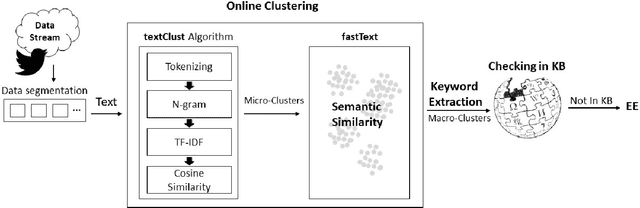
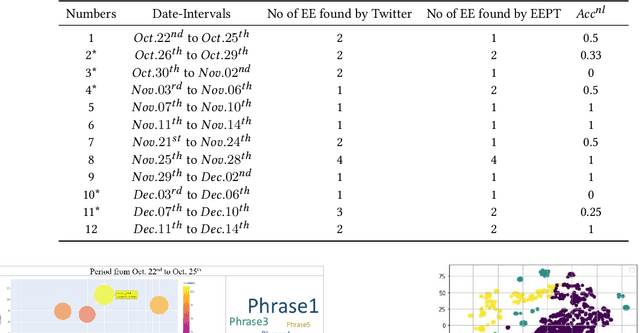
Some events which happen in the future could be important for companies, governments, and even our personal life. Prediction of these events before their establishment is helpful for efficient decision-making. We call such events emerging entities. They have not taken place yet, and there is no information about them in KB. However, some clues exist in different areas, especially on social media. Thus, retrieving these type of entities are possible. This paper proposes a method of early discovery of emerging entities. We use semantic clustering of short messages. To evaluate the performance of our proposal, we devise and utilize a performance evaluation metric. The results show that our proposed method finds those emerging entities of which Twitter trends are not always capable.
Leveraging Social Influence based on Users Activity Centers for Point-of-Interest Recommendation
Jan 10, 2022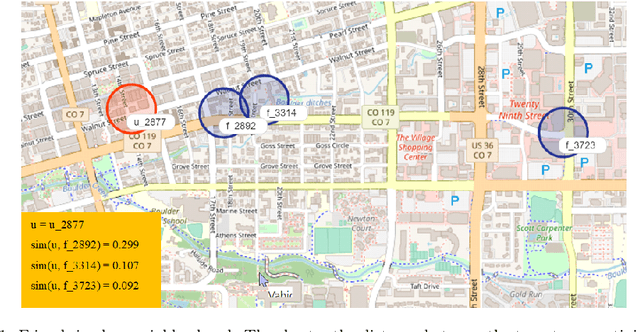
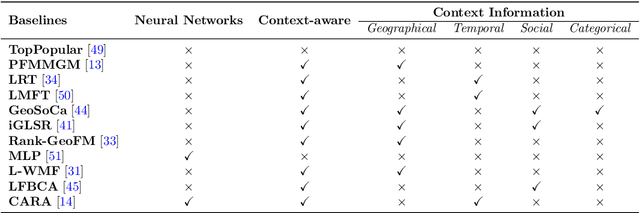
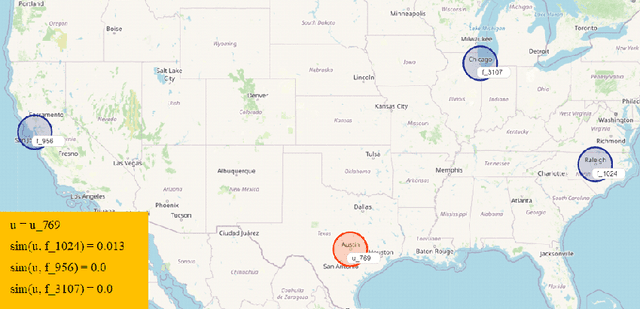
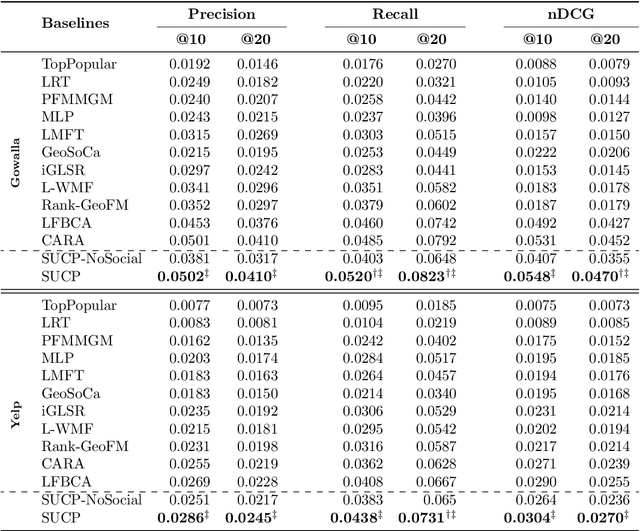
Recommender Systems (RSs) aim to model and predict the user preference while interacting with items, such as Points of Interest (POIs). These systems face several challenges, such as data sparsity, limiting their effectiveness. In this paper, we address this problem by incorporating social, geographical, and temporal information into the Matrix Factorization (MF) technique. To this end, we model social influence based on two factors: similarities between users in terms of common check-ins and the friendships between them. We introduce two levels of friendship based on explicit friendship networks and high check-in overlap between users. We base our friendship algorithm on users' geographical activity centers. The results show that our proposed model outperforms the state-of-the-art on two real-world datasets. More specifically, our ablation study shows that the social model improves the performance of our proposed POI recommendation system by 31% and 14% on the Gowalla and Yelp datasets in terms of Precision@10, respectively.
Security Games with Ambiguous Beliefs of Agents
Aug 09, 2015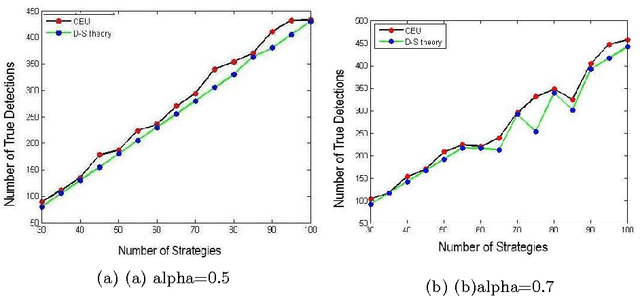
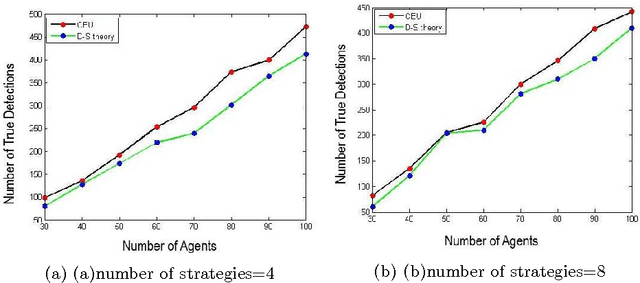
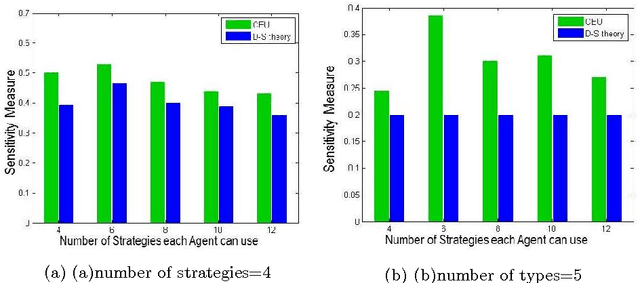
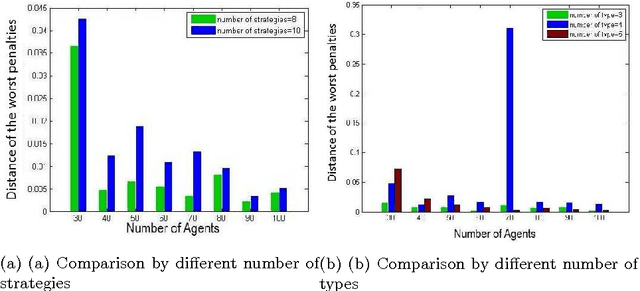
Currently the Dempster-Shafer based algorithm and Uniform Random Probability based algorithm are the preferred method of resolving security games, in which defenders are able to identify attackers and only strategy remained ambiguous. However this model is inefficient in situations where resources are limited and both the identity of the attackers and their strategies are ambiguous. The intent of this study is to find a more effective algorithm to guide the defenders in choosing which outside agents with which to cooperate given both ambiguities. We designed an experiment where defenders were compelled to engage with outside agents in order to maximize protection of their targets. We introduced two important notions: the behavior of each agent in target protection and the tolerance threshold in the target protection process. From these, we proposed an algorithm that was applied by each defender to determine the best potential assistant(s) with which to cooperate. Our results showed that our proposed algorithm is safer than the Dempster-Shafer based algorithm.
Task Allocation in Robotic Swarms: Explicit Communication Based Approaches
Mar 01, 2015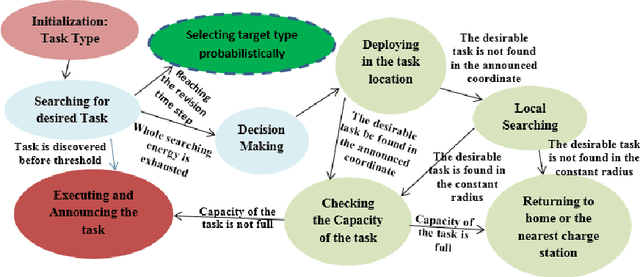
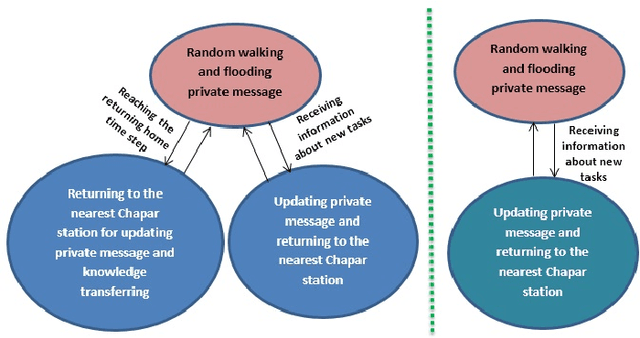
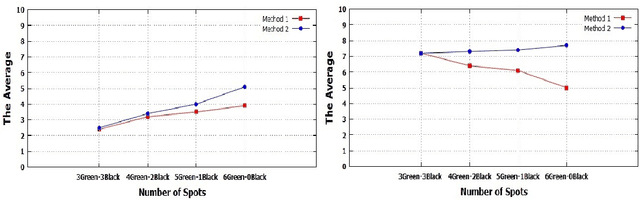
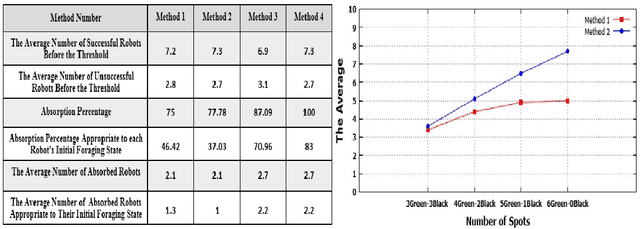
In this paper we study multi robot cooperative task allocation issue in a situation where a swarm of robots is deployed in a confined unknown environment where the number of colored spots which represent tasks and the ratios of them are unknown. The robots should cover this spots as far as possible to do cleaning and sampling actions desirably. It means that they should discover the spots cooperatively and spread proportional to the spots area and avoid from remaining idle. We proposed 4 self-organized distributed methods which are called hybrid methods for coping with this scenario. In two different experiments the performance of the methods is analyzed. We compared them with each other and investigated their scalability and robustness in term of single point of failure.