 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-UAV Uniform Sweep Coverage in Unknown Environments: A Mergeable Nervous System (MNS)-Based Random Exploration
Sep 17, 2024This paper investigates the problem of multi-UAV uniform sweep coverage, where a homogeneous swarm of UAVs must collectively and evenly visit every portion of an unknown environment for a sampling task without having access to their own location and orientation. Random walk-based exploration strategies are practical for such a coverage scenario as they do not rely on localization and are easily implementable in robot swarms. We demonstrate that the Mergeable Nervous System (MNS) framework, which enables a robot swarm to self-organize into a hierarchical ad-hoc communication network using local communication, is a promising control approach for random exploration in unknown environments by UAV swarms. To this end, we propose an MNS-based random walk approach where UAVs self-organize into a line formation using the MNS framework and then follow a random walk strategy to cover the environment while maintaining the formation. Through simulations, we test the efficiency of our approach against several decentralized random walk-based strategies as benchmarks. Our results show that the MNS-based random walk outperforms the benchmarks in terms of the time required to achieve full coverage and the coverage uniformity at that time, assessed across both the entire environment and within local regions.
Centralization vs. decentralization in multi-robot coverage: Ground robots under UAV supervision
Aug 13, 2024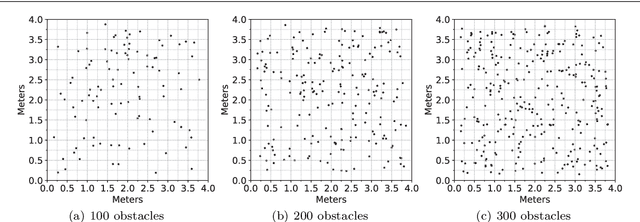
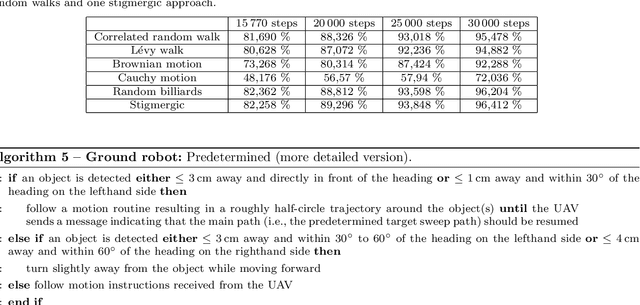
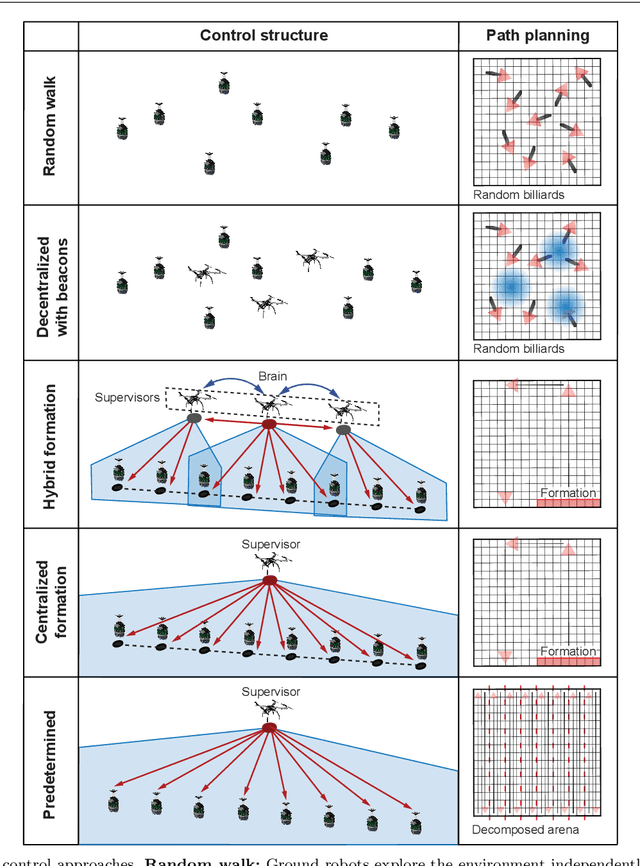

In swarm robotics, decentralized control is often proposed as a more scalable and fault-tolerant alternative to centralized control. However, centralized behaviors are often faster and more efficient than their decentralized counterparts. In any given application, the goals and constraints of the task being solved should guide the choice to use centralized control, decentralized control, or a combination of the two. Currently, the tradeoffs that exist between centralization and decentralization have not been thoroughly studied. In this paper, we investigate these tradeoffs for multi-robot coverage, and find that they are more nuanced than expected. For instance, our findings reinforce the expectation that more decentralized control will provide better scalability, but contradict the expectation that more decentralized control will perform better in environments with randomized obstacles. Beginning with a group of fully independent ground robots executing coverage, we add unmanned aerial vehicles as supervisors and progressively increase the degree to which the supervisors use centralized control, in terms of access to global information and a central coordinating entity. We compare, using the multi-robot physics-based simulation environment ARGoS, the following four control approaches: decentralized control, hybrid control, centralized control, and predetermined control. In comparing the ground robots performing the coverage task, we assess the speed and efficiency advantages of centralization -- in terms of coverage completeness and coverage uniformity -- and we assess the scalability and fault tolerance advantages of decentralization. We also assess the energy expenditure disadvantages of centralization due to different energy consumption rates of ground robots and unmanned aerial vehicles, according to the specifications of robots available off-the-shelf.
Task Allocation in Robotic Swarms: Explicit Communication Based Approaches
Mar 01, 2015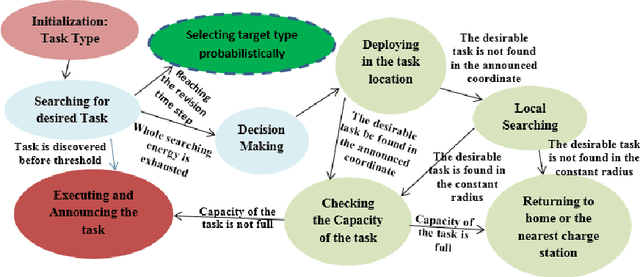
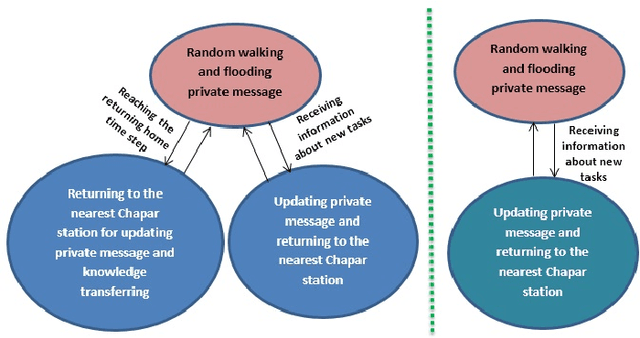
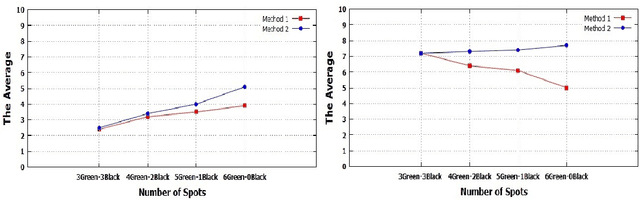
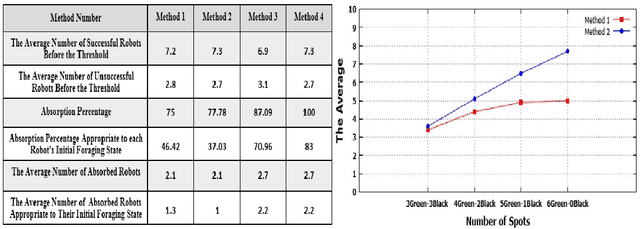
In this paper we study multi robot cooperative task allocation issue in a situation where a swarm of robots is deployed in a confined unknown environment where the number of colored spots which represent tasks and the ratios of them are unknown. The robots should cover this spots as far as possible to do cleaning and sampling actions desirably. It means that they should discover the spots cooperatively and spread proportional to the spots area and avoid from remaining idle. We proposed 4 self-organized distributed methods which are called hybrid methods for coping with this scenario. In two different experiments the performance of the methods is analyzed. We compared them with each other and investigated their scalability and robustness in term of single point of failure.