 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCentralization vs. decentralization in multi-robot coverage: Ground robots under UAV supervision
Paper and Code
Aug 13, 2024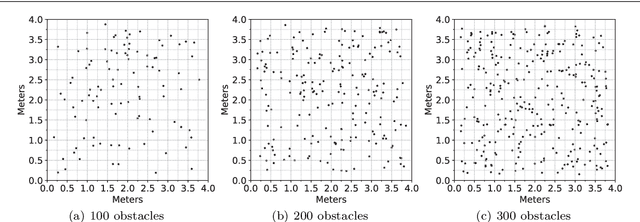
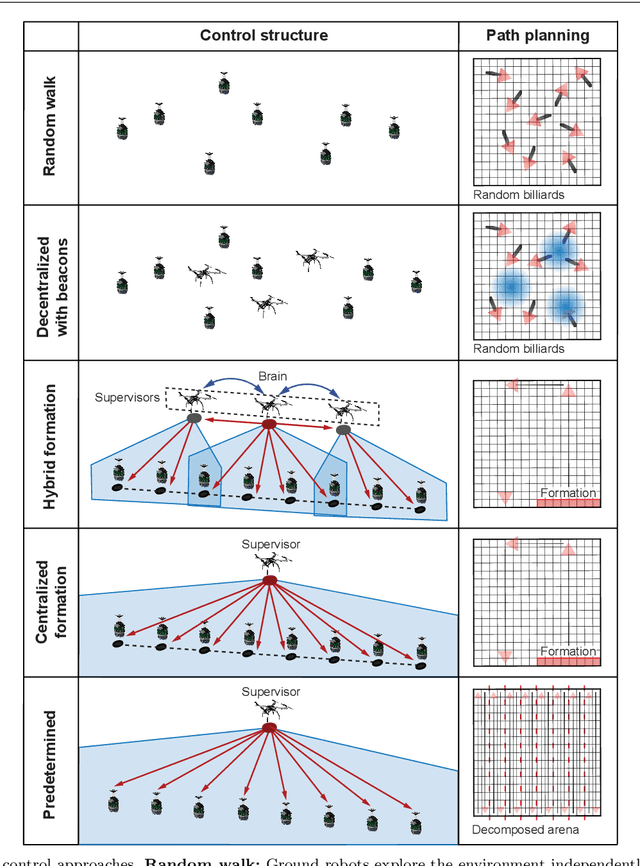

In swarm robotics, decentralized control is often proposed as a more scalable and fault-tolerant alternative to centralized control. However, centralized behaviors are often faster and more efficient than their decentralized counterparts. In any given application, the goals and constraints of the task being solved should guide the choice to use centralized control, decentralized control, or a combination of the two. Currently, the tradeoffs that exist between centralization and decentralization have not been thoroughly studied. In this paper, we investigate these tradeoffs for multi-robot coverage, and find that they are more nuanced than expected. For instance, our findings reinforce the expectation that more decentralized control will provide better scalability, but contradict the expectation that more decentralized control will perform better in environments with randomized obstacles. Beginning with a group of fully independent ground robots executing coverage, we add unmanned aerial vehicles as supervisors and progressively increase the degree to which the supervisors use centralized control, in terms of access to global information and a central coordinating entity. We compare, using the multi-robot physics-based simulation environment ARGoS, the following four control approaches: decentralized control, hybrid control, centralized control, and predetermined control. In comparing the ground robots performing the coverage task, we assess the speed and efficiency advantages of centralization -- in terms of coverage completeness and coverage uniformity -- and we assess the scalability and fault tolerance advantages of decentralization. We also assess the energy expenditure disadvantages of centralization due to different energy consumption rates of ground robots and unmanned aerial vehicles, according to the specifications of robots available off-the-shelf.