 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenRC: An Open-Source Robotic Colonoscopy Framework for Multimodal Data Acquisition and Autonomy Research
Apr 04, 2026Colorectal cancer screening critically depends on colonoscopy, yet existing platforms offer limited support for systematically studying the coupled dynamics of operator control, instrument motion, and visual feedback. This gap restricts reproducible closed-loop research in robotic colonoscopy, medical imaging, and emerging vision-language-action (VLA) learning paradigms. To address this challenge, we present OpenRC, an open-source modular robotic colonoscopy framework that retrofits conventional scopes while preserving clinical workflow. The framework supports simultaneous recording of video, operator commands, actuation state, and distal tip pose. We experimentally validated motion consistency and quantified cross-modal latency across sensing streams. Using this platform, we collected a multimodal dataset comprising 1,894 teleoperated episodes ~19 hours across 10 structured task variations of routine navigation, failure events, and recovery behaviors. By unifying open hardware and an aligned multimodal dataset, OpenRC provides a reproducible foundation for research in multimodal robotic colonoscopy and surgical autonomy.
Dynamic Structural Recovery Parameters Enhance Prediction of Visual Outcomes After Macular Hole Surgery
Sep 11, 2025Purpose: To introduce novel dynamic structural parameters and evaluate their integration within a multimodal deep learning (DL) framework for predicting postoperative visual recovery in idiopathic full-thickness macular hole (iFTMH) patients. Methods: We utilized a publicly available longitudinal OCT dataset at five stages (preoperative, 2 weeks, 3 months, 6 months, and 12 months). A stage specific segmentation model delineated related structures, and an automated pipeline extracted quantitative, composite, qualitative, and dynamic features. Binary logistic regression models, constructed with and without dynamic parameters, assessed their incremental predictive value for best-corrected visual acuity (BCVA). A multimodal DL model combining clinical variables, OCT-derived features, and raw OCT images was developed and benchmarked against regression models. Results: The segmentation model achieved high accuracy across all timepoints (mean Dice > 0.89). Univariate and multivariate analyses identified base diameter, ellipsoid zone integrity, and macular hole area as significant BCVA predictors (P < 0.05). Incorporating dynamic recovery rates consistently improved logistic regression AUC, especially at the 3-month follow-up. The multimodal DL model outperformed logistic regression, yielding higher AUCs and overall accuracy at each stage. The difference is as high as 0.12, demonstrating the complementary value of raw image volume and dynamic parameters. Conclusions: Integrating dynamic parameters into the multimodal DL model significantly enhances the accuracy of predictions. This fully automated process therefore represents a promising clinical decision support tool for personalized postoperative management in macular hole surgery.
Fast 5DOF Needle Tracking in iOCT
Feb 18, 2018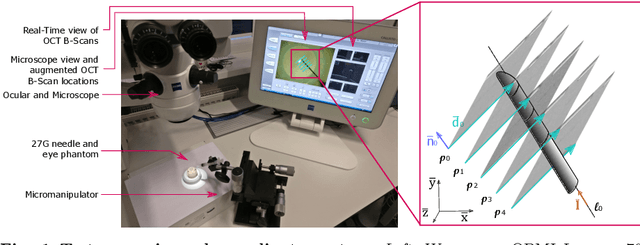
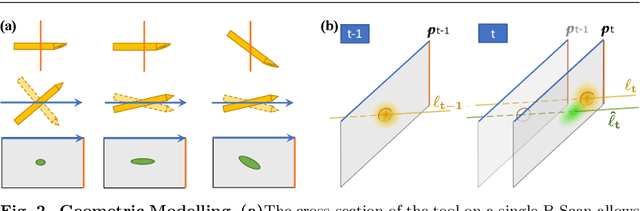
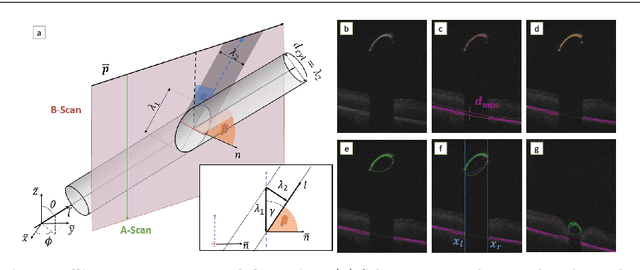
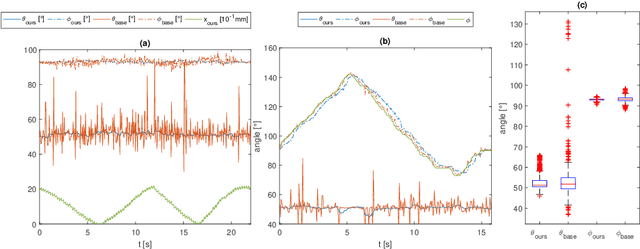
Purpose. Intraoperative Optical Coherence Tomography (iOCT) is an increasingly available imaging technique for ophthalmic microsurgery that provides high-resolution cross-sectional information of the surgical scene. We propose to build on its desirable qualities and present a method for tracking the orientation and location of a surgical needle. Thereby, we enable direct analysis of instrument-tissue interaction directly in OCT space without complex multimodal calibration that would be required with traditional instrument tracking methods. Method. The intersection of the needle with the iOCT scan is detected by a peculiar multi-step ellipse fitting that takes advantage of the directionality of the modality. The geometric modelling allows us to use the ellipse parameters and provide them into a latency aware estimator to infer the 5DOF pose during needle movement. Results. Experiments on phantom data and ex-vivo porcine eyes indicate that the algorithm retains angular precision especially during lateral needle movement and provides a more robust and consistent estimation than baseline methods. Conclusion. Using solely crosssectional iOCT information, we are able to successfully and robustly estimate a 5DOF pose of the instrument in less than 5.5 ms on a CPU.