 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLight-weight Deformable Registration using Adversarial Learning with Distilling Knowledge
Oct 04, 2021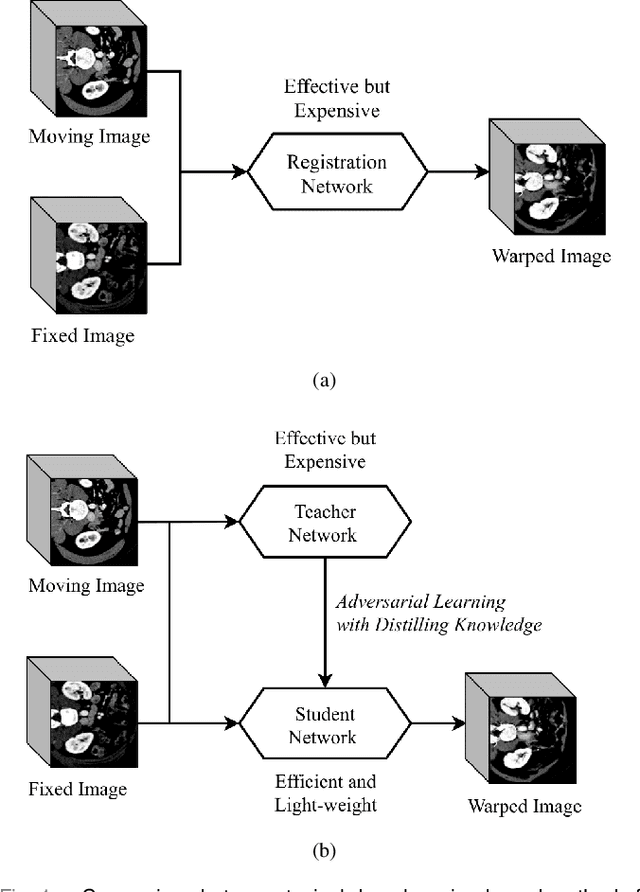
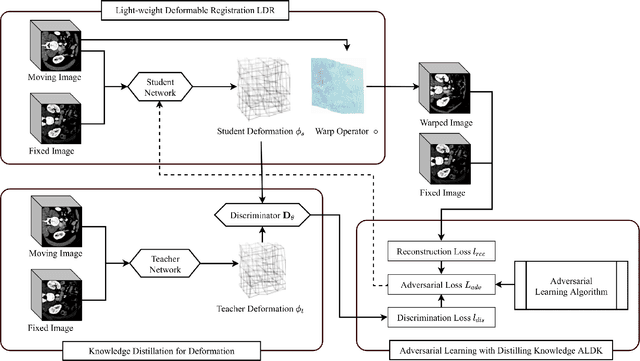
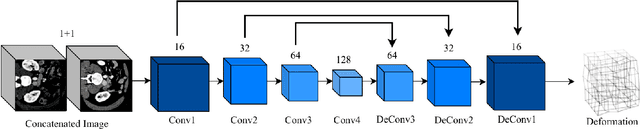

Deformable registration is a crucial step in many medical procedures such as image-guided surgery and radiation therapy. Most recent learning-based methods focus on improving the accuracy by optimizing the non-linear spatial correspondence between the input images. Therefore, these methods are computationally expensive and require modern graphic cards for real-time deployment. In this paper, we introduce a new Light-weight Deformable Registration network that significantly reduces the computational cost while achieving competitive accuracy. In particular, we propose a new adversarial learning with distilling knowledge algorithm that successfully leverages meaningful information from the effective but expensive teacher network to the student network. We design the student network such as it is light-weight and well suitable for deployment on a typical CPU. The extensively experimental results on different public datasets show that our proposed method achieves state-of-the-art accuracy while significantly faster than recent methods. We further show that the use of our adversarial learning algorithm is essential for a time-efficiency deformable registration method. Finally, our source code and trained models are available at: https://github.com/aioz-ai/LDR_ALDK.
Mobile Robot Planner with Low-cost Cameras Using Deep Reinforcement Learning
Dec 21, 2020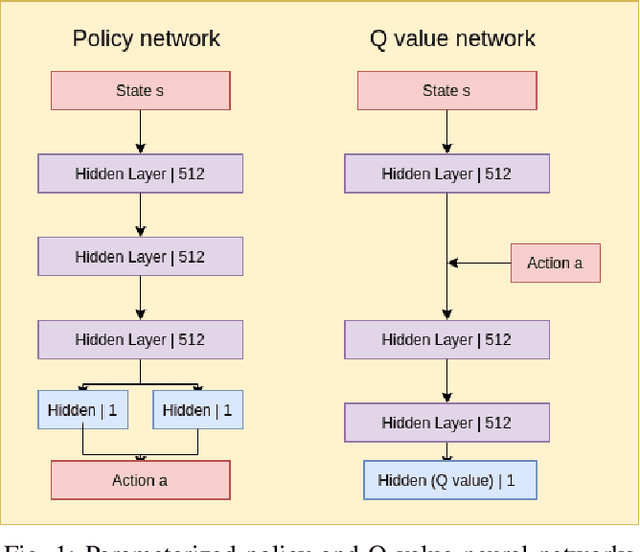
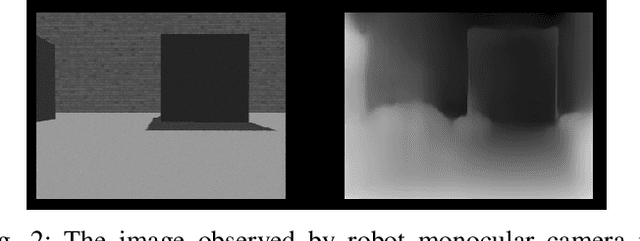
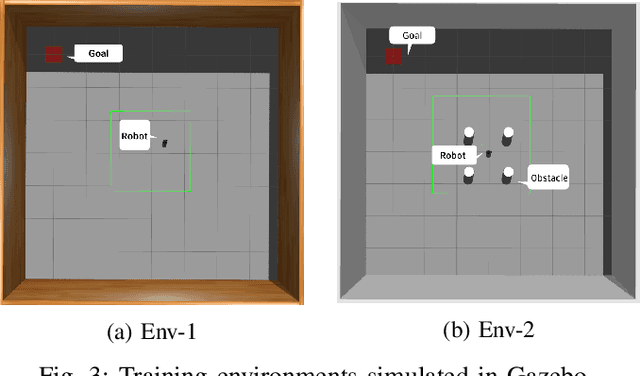
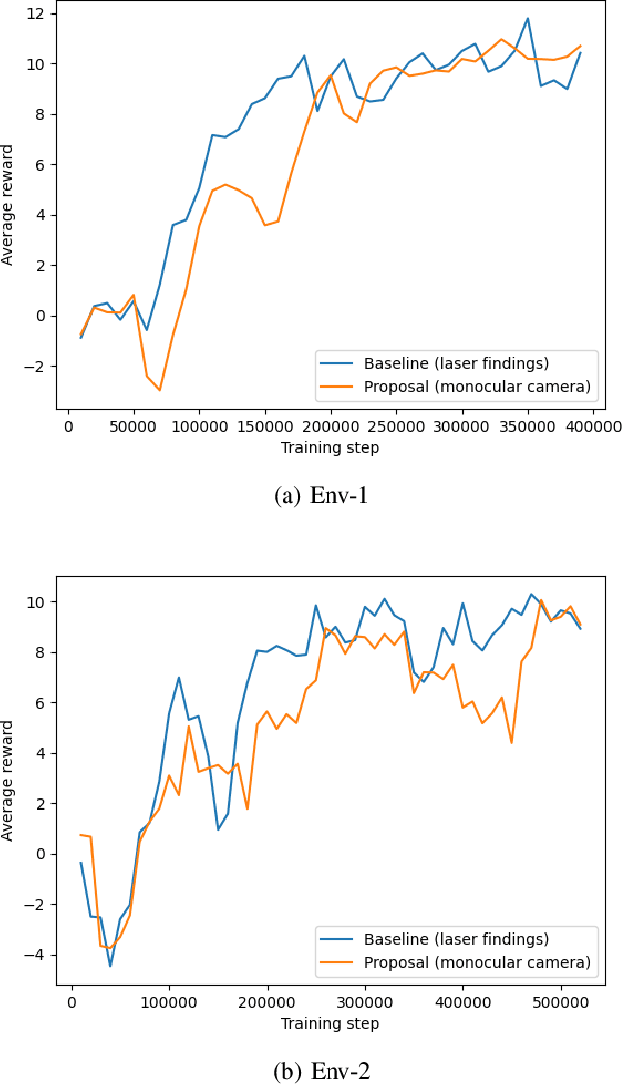
This study develops a robot mobility policy based on deep reinforcement learning. Since traditional methods of conventional robotic navigation depend on accurate map reproduction as well as require high-end sensors, learning-based methods are positive trends, especially deep reinforcement learning. The problem is modeled in the form of a Markov Decision Process (MDP) with the agent being a mobile robot. Its state of view is obtained by the input sensors such as laser findings or cameras and the purpose is navigating to the goal without any collision. There have been many deep learning methods that solve this problem. However, in order to bring robots to market, low-cost mass production is also an issue that needs to be addressed. Therefore, this work attempts to construct a pseudo laser findings system based on direct depth matrix prediction from a single camera image while still retaining stable performances. Experiment results show that they are directly comparable with others using high-priced sensors.