 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeECG Heartbeat classification using deep transfer learning with Convolutional Neural Network and STFT technique
Jul 05, 2022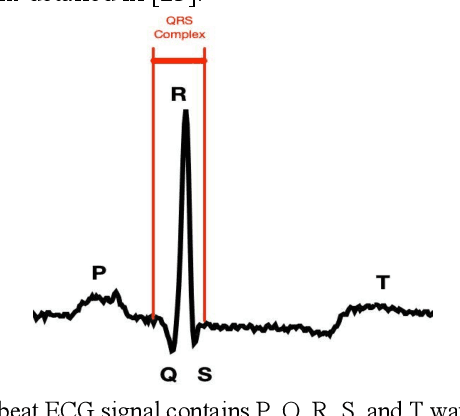
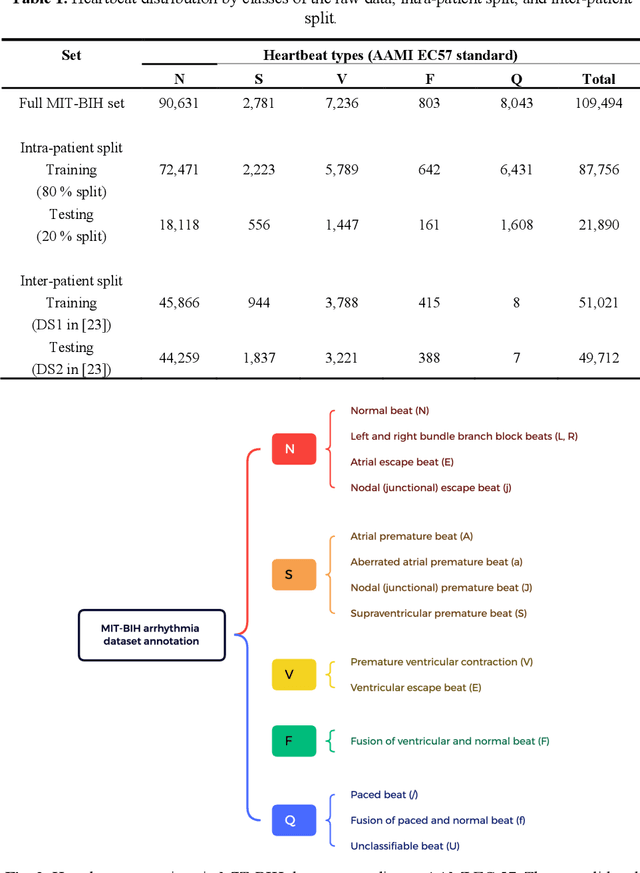
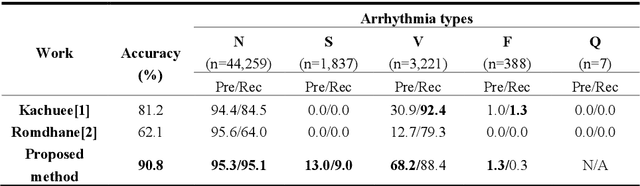
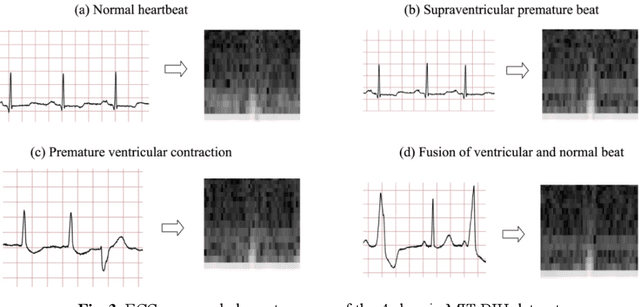
Electrocardiogram (ECG) is a simple non-invasive measure to identify heart-related issues such as irregular heartbeats known as arrhythmias. While artificial intelligence and machine learning is being utilized in a wide range of healthcare related applications and datasets, many arrhythmia classifiers using deep learning methods have been proposed in recent years. However, sizes of the available datasets from which to build and assess machine learning models is often very small and the lack of well-annotated public ECG datasets is evident. In this paper, we propose a deep transfer learning framework that is aimed to perform classification on a small size training dataset. The proposed method is to fine-tune a general-purpose image classifier ResNet-18 with MIT-BIH arrhythmia dataset in accordance with the AAMI EC57 standard. This paper further investigates many existing deep learning models that have failed to avoid data leakage against AAMI recommendations. We compare how different data split methods impact the model performance. This comparison study implies that future work in arrhythmia classification should follow the AAMI EC57 standard when using any including MIT-BIH arrhythmia dataset.
Data generation using simulation technology to improve perception mechanism of autonomous vehicles
Jul 01, 2022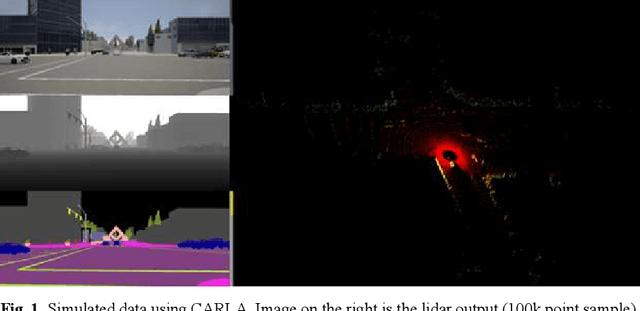


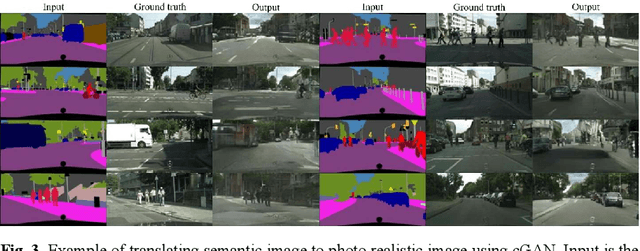
Recent advancements in computer graphics technology allow more realistic ren-dering of car driving environments. They have enabled self-driving car simulators such as DeepGTA-V and CARLA (Car Learning to Act) to generate large amounts of synthetic data that can complement the existing real-world dataset in training autonomous car perception. Furthermore, since self-driving car simulators allow full control of the environment, they can generate dangerous driving scenarios that the real-world dataset lacks such as bad weather and accident scenarios. In this paper, we will demonstrate the effectiveness of combining data gathered from the real world with data generated in the simulated world to train perception systems on object detection and localization task. We will also propose a multi-level deep learning perception framework that aims to emulate a human learning experience in which a series of tasks from the simple to more difficult ones are learned in a certain domain. The autonomous car perceptron can learn from easy-to-drive scenarios to more challenging ones customized by simulation software.
Range of Motion Sensors for Monitoring Recovery of Total Knee Arthroplasty
Jul 01, 2022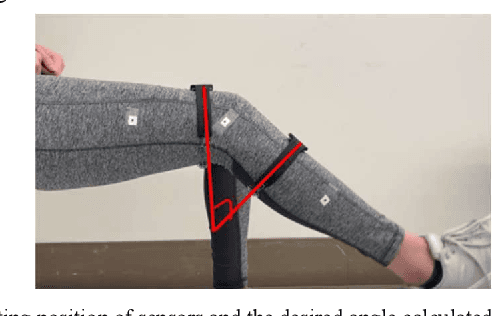
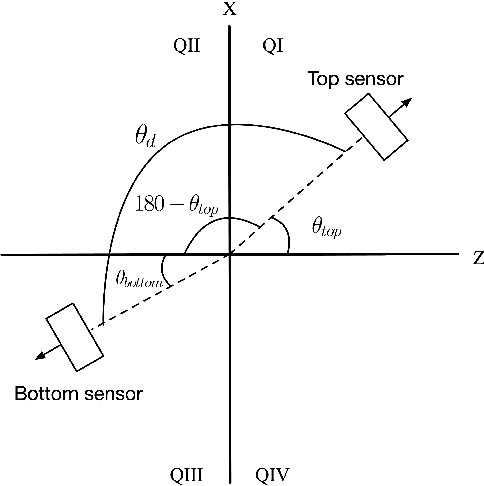
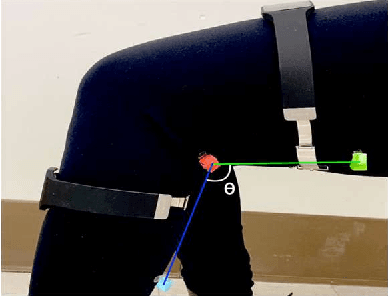
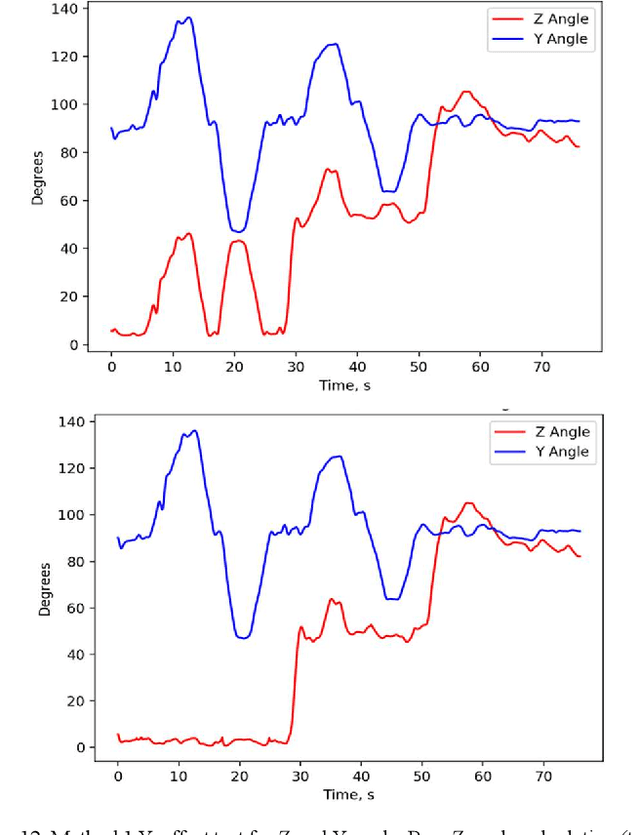
A low-cost, accurate device to measure and record knee range of motion (ROM) is of the essential need to improve confidence in at-home rehabilitation. It is to reduce hospital stay duration and overall medical cost after Total Knee Arthroplasty (TKA) procedures. The shift in Medicare funding from pay-as-you-go to the Bundled Payments for Care Improvement (BPCI) has created a push towards at-home care over extended hospital stays. It has heavily affected TKA patients, who typically undergo physical therapy at the clinic after the procedure to ensure full recovery of ROM. In this paper, we use accelerometers to create a ROM sensor that can be integrated into the post-operative surgical dressing, so that the cost of the sensors can be included in the bundled payments. In this paper, we demonstrate the efficacy of our method in comparison to the baseline computer vision method. Our results suggest that calculating angular displacement from accelerometer sensors demonstrates accurate ROM recordings under both stationary and walking conditions. The device would keep track of angle measurements and alert the patient when certain angle thresholds have been crossed, allowing patients to recover safely at home instead of going to multiple physical therapy sessions. The affordability of our sensor makes it more accessible to patients in need.