 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoMatcher: Multi-View Collaborative Feature Matching
Apr 02, 2025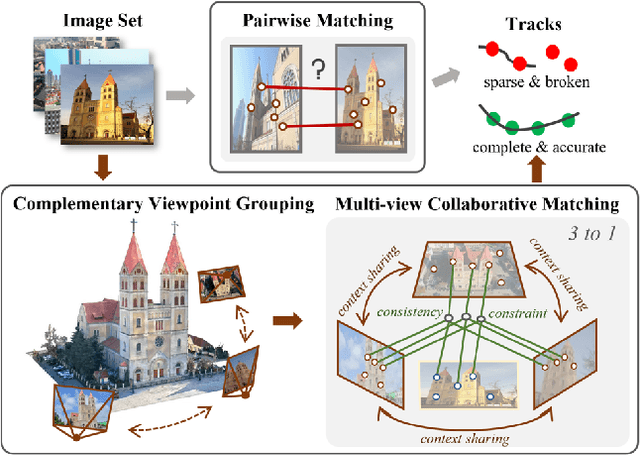
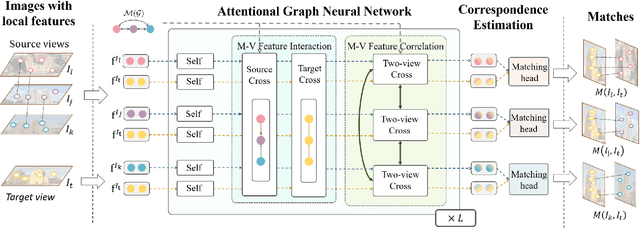
This paper proposes a multi-view collaborative matching strategy for reliable track construction in complex scenarios. We observe that the pairwise matching paradigms applied to image set matching often result in ambiguous estimation when the selected independent pairs exhibit significant occlusions or extreme viewpoint changes. This challenge primarily stems from the inherent uncertainty in interpreting intricate 3D structures based on limited two-view observations, as the 3D-to-2D projection leads to significant information loss. To address this, we introduce CoMatcher, a deep multi-view matcher to (i) leverage complementary context cues from different views to form a holistic 3D scene understanding and (ii) utilize cross-view projection consistency to infer a reliable global solution. Building on CoMatcher, we develop a groupwise framework that fully exploits cross-view relationships for large-scale matching tasks. Extensive experiments on various complex scenarios demonstrate the superiority of our method over the mainstream two-view matching paradigm.
* 15 pages, 7 figures, to be published in CVPR 2025
Shape Anchor Guided Holistic Indoor Scene Understanding
Sep 20, 2023This paper proposes a shape anchor guided learning strategy (AncLearn) for robust holistic indoor scene understanding. We observe that the search space constructed by current methods for proposal feature grouping and instance point sampling often introduces massive noise to instance detection and mesh reconstruction. Accordingly, we develop AncLearn to generate anchors that dynamically fit instance surfaces to (i) unmix noise and target-related features for offering reliable proposals at the detection stage, and (ii) reduce outliers in object point sampling for directly providing well-structured geometry priors without segmentation during reconstruction. We embed AncLearn into a reconstruction-from-detection learning system (AncRec) to generate high-quality semantic scene models in a purely instance-oriented manner. Experiments conducted on the challenging ScanNetv2 dataset demonstrate that our shape anchor-based method consistently achieves state-of-the-art performance in terms of 3D object detection, layout estimation, and shape reconstruction. The code will be available at https://github.com/Geo-Tell/AncRec.