 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Routing Strategies for Autonomous Underwater Vehicles in Time-Varying Environment
Aug 04, 2020



This paper presents a mission system and the therein implemented algorithms for path planning in a time-varying environment based on graph methods. The basic task of the introduced path planning algorithms is to find a time-optimal path from a defined start position to a goal position with consideration of the time-varying ocean current for an autonomous underwater vehicle (AUV). Building on this, additional practice-oriented considerations in planning are discussed in this paper. Such points are the discussion of possible methods to accelerate the algorithms and the determination of the optimal departure time. The solutions and algorithms presented in this paper are focused on path planning requirements for the AUV ``SLOCUM Glider''. These algorithms are equally applicable to other AUVs or aerial mobile autonomous systems.
* 12 pages, 13 figures. arXiv admin note: substantial text overlap with arXiv:1702.08101, arXiv:1702.08104
Model Identification and Controller Parameter Optimization for an Autopilot Design for Autonomous Underwater Vehicles
Jul 10, 2017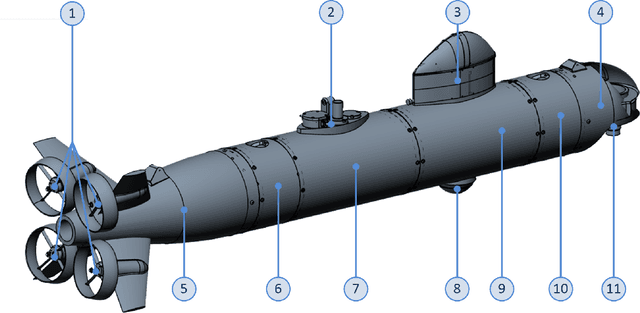
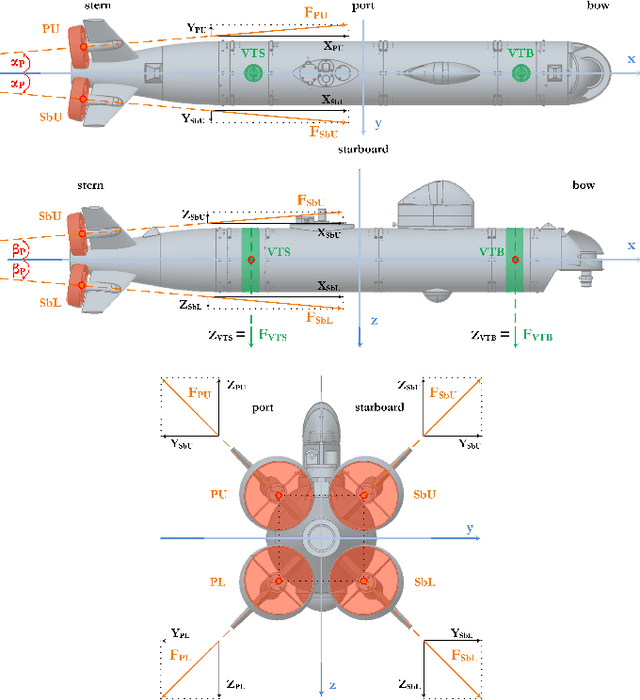
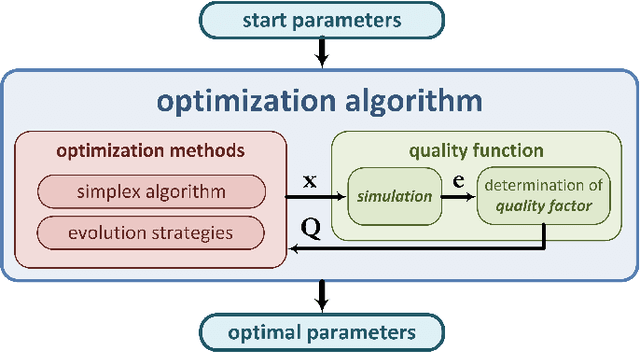
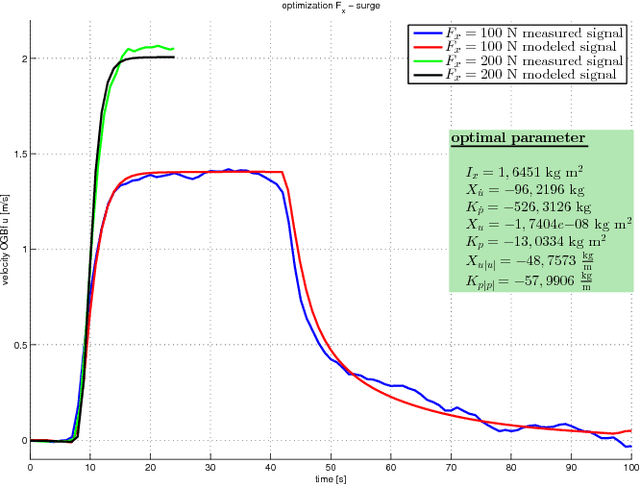
Nowadays an accurate modeling of the system to be controlled is essential for reliable autopilot. This paper presents a non-linear model of the autonomous underwater vehicle 'CWolf'. Matrices and the corresponding coefficients generate a parameterized representation for added mass, Coriolis and centripetal forces, damping, gravity and buoyancy, using the equations of motion, for all six degrees of freedom. The determination of actuator behaviour by surge tests allows the conversion of propeller revolutions to the respective forces and moments. Based on geometric approximations, the coefficients of the model can be specified by optimization algorithms in 'open loop' sea trials. The realistic model is the basis for the subsequent design of the autopilot. The reference variables used in the four decoupled adaptive PID controllers for surge, heading, pitch and heave are provided a 'Line of Sight' - guidance system. A constraint criteria optimization determines the required controller parameters. The verification by 'closed loop' sea trials ensures the results.
Guidance of an Autonomous Underwater Vehicle in Special Situations
Feb 26, 2017
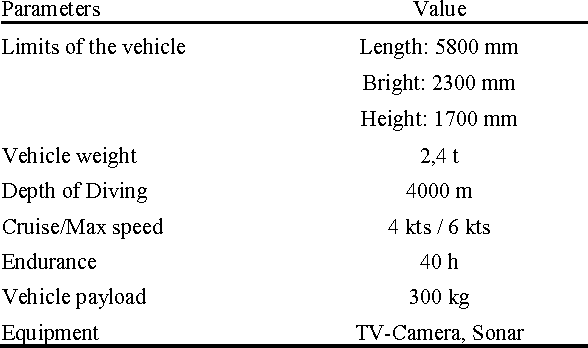
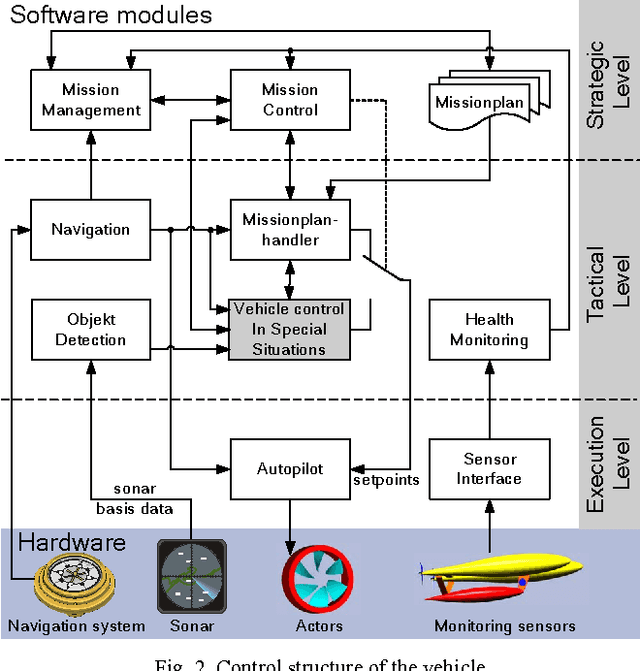
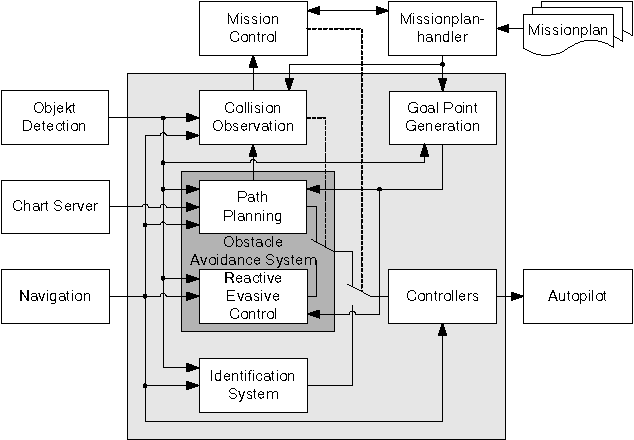
This article describes a guidance system of the autonomous underwater vehicle "DeepC" [1] in Special situations. A special situation occurs when one or more objects interfere with the planned route of a mission. The possible reactions are evasion or identification of the objects. The paper presents these two tasks in overview. The special demands challenges of the underwater environment, computer parameters, sensors and the maneuverability of the vehicle are considered in the selection and development of the required strategies. Such challenges include the sea current, maneuver in the 3-D space and the limited perceptive faculty of the sonar.
A New Concept for an Obstacle Avoidance System for the AUV "SLOCUM Glider" Operation under Ice
Feb 26, 2017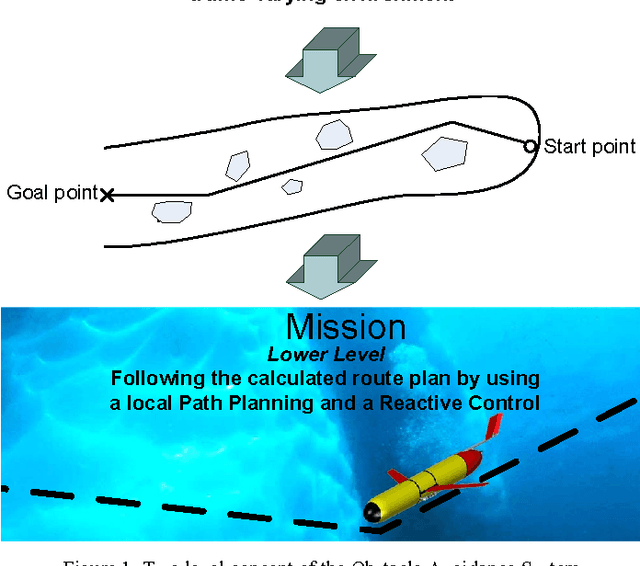
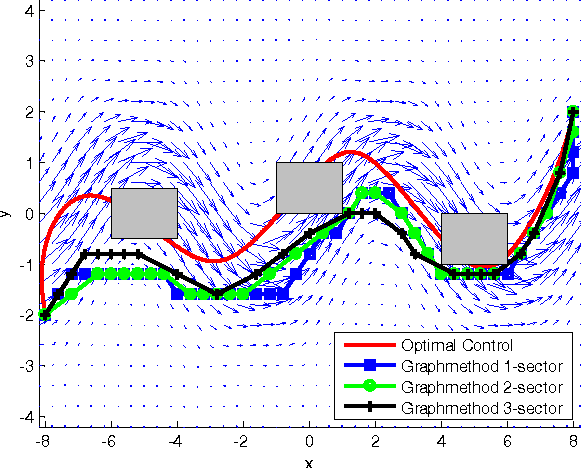
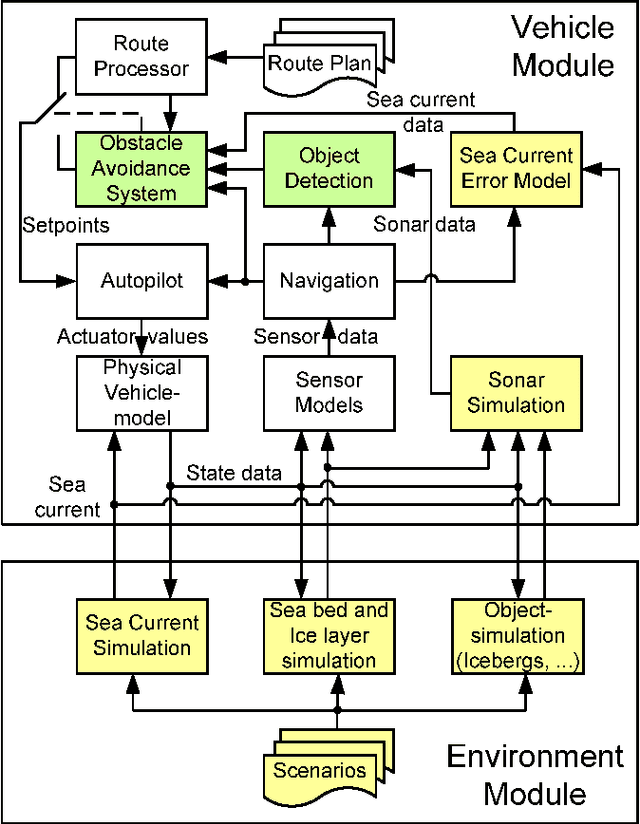
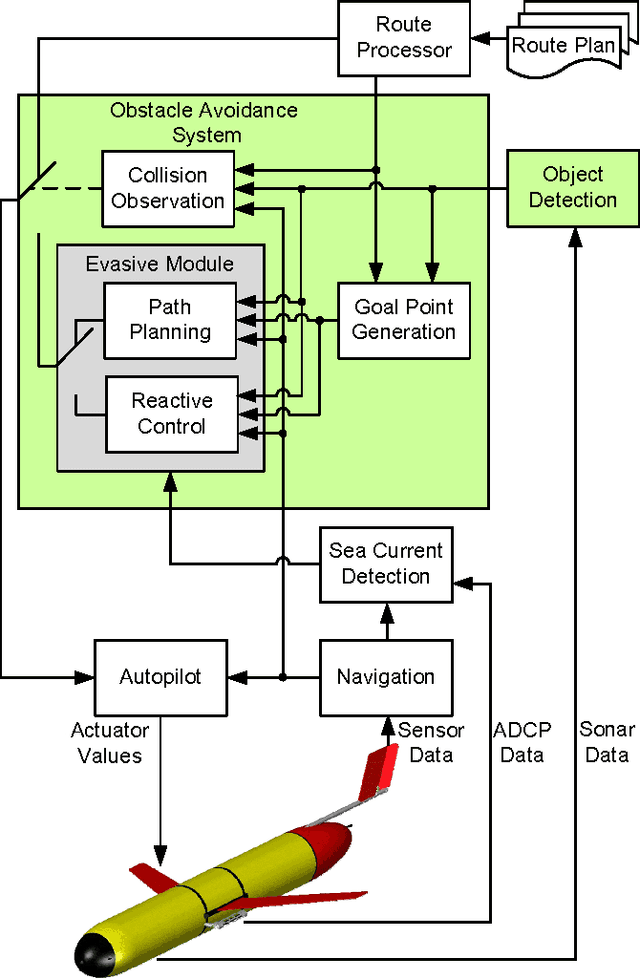
This paper presents a concept for a control System for an autonomous underwater vehicle under ice using a "SLOCUM" underwater glider. The project concept, the separate working tasks for the next one-and-a-half years and the first results will be presented. In this context the structure of the obstacle avoidance system and a simulator structure with a sensor and environment simulation as well as the interfaces to the glider hardware will be discussed. As a first result of the main research, a graph-based algorithm for the path planning in a time-varying environment (variable ocean field, moving obstacles) will be described.
A Mission Planning System for the AUV "SLOCUM Glider" for the Newfoundland and Labrador Shelf
Feb 26, 2017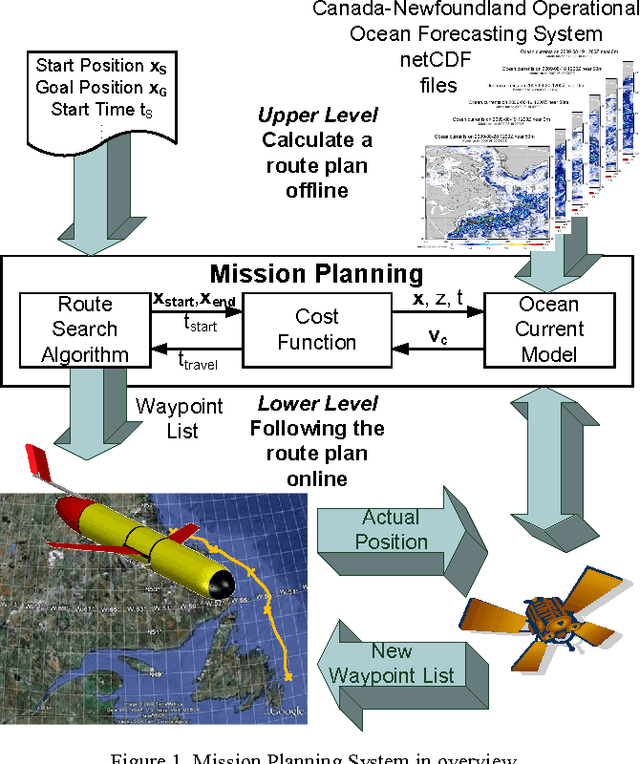
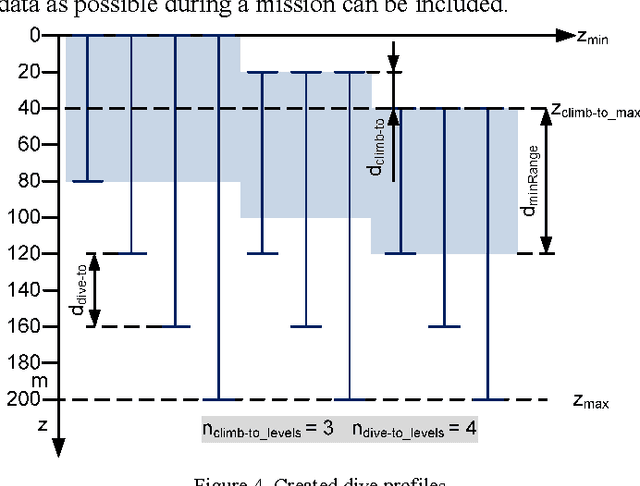
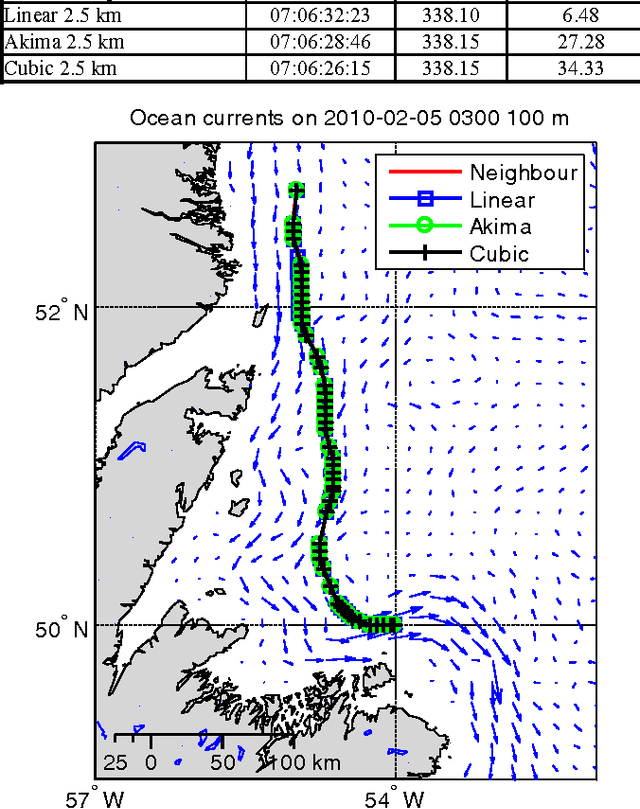
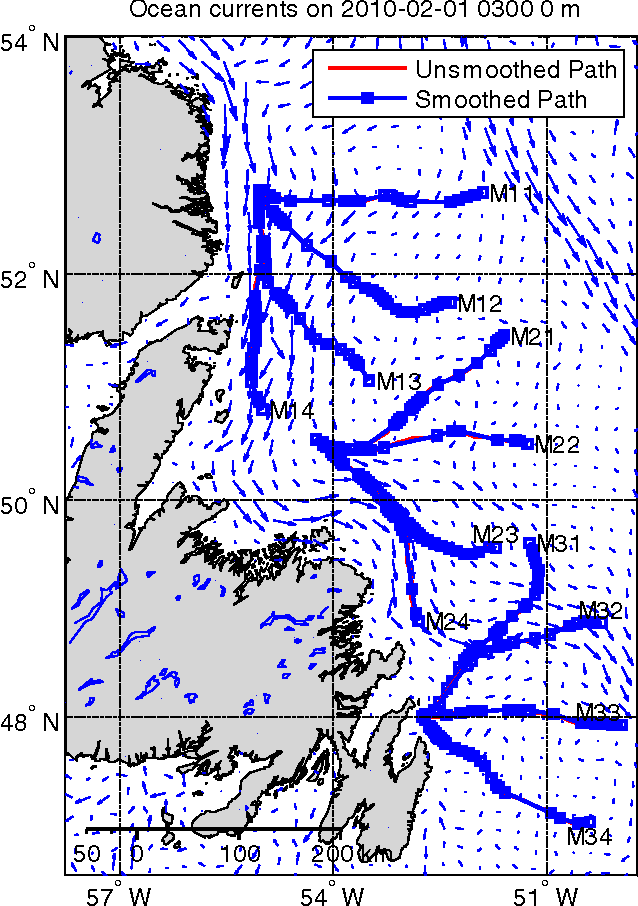
This paper presents a system for mission planning for an autonomous underwater vehicle in time-varying ocean currents. The mission planning system is designed for the AUV "SLOCUM Glider" to collect oceanographic data along the Newfoundland and Labrador Shelf. The data will be used in conjunction with a numerical ocean model currently under development by the Department of Fisheries and Oceans Canada. This allows for the validation and the modification of existing ocean current and climate models as well as the design of new models with the aim of improving the accuracy of forecasts. The use of the ocean current forecast data in netCDF format in an ocean current model, the algorithms which consider glider-specific behaviour, details of the program's technical implementation in C++, and, preliminary results will be described.
Solutions for Practice-oriented Requirements for Optimal Path Planning for the AUV "SLOCUM Glider"
Feb 26, 2017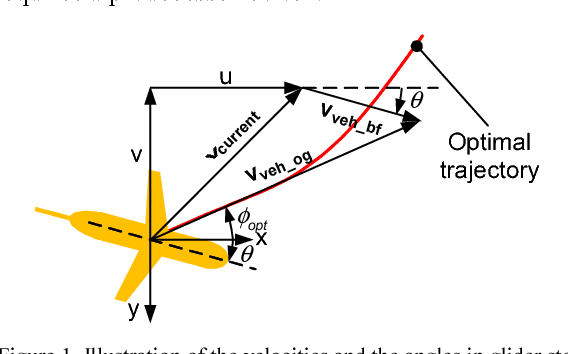
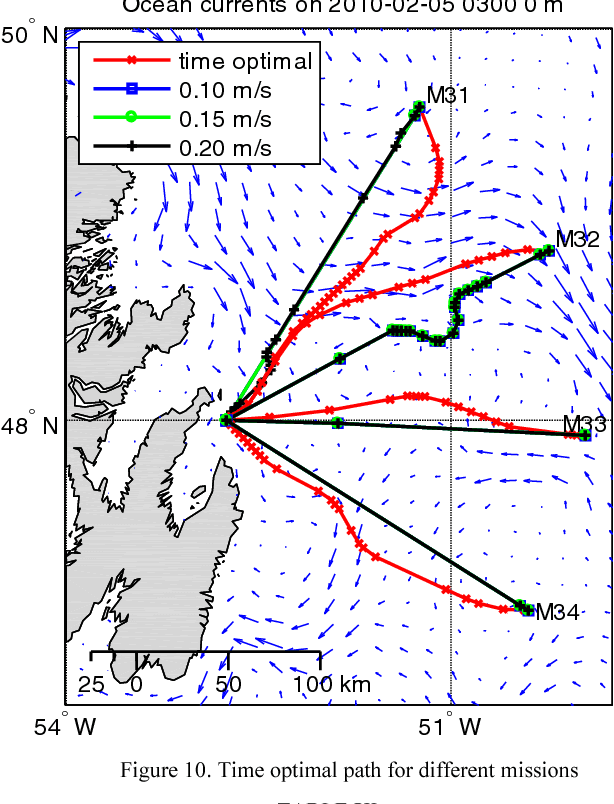
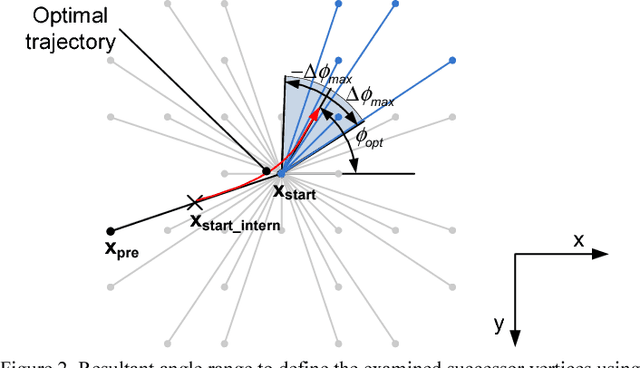
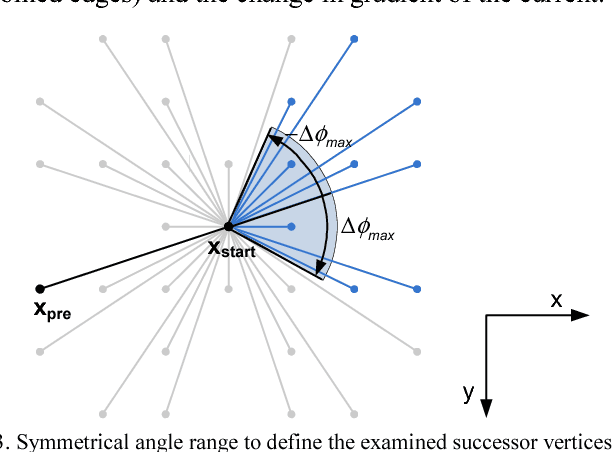
This paper presents a few important practiceoriented requirements for optimal path planning for the AUV "SLOCUM Glider" as well as solutions using fast graph basedalgorithms. These algorithms build upon the TVE (time-varying environment) search algorithm. The experience with this algorithm, requirements of real missions along the Newfoundland and Labrador Shelf and the idea to find the optimal departure time are the motivation to address the field of research, which is described in this paper. The main focus of this paper is a discussion of possible methods to accelerate the path planning algorithm, without deterioration of the results.
Opportunities to Parallelize Path Planning Algorithms for Autonomous Underwater Vehicles
Feb 26, 2017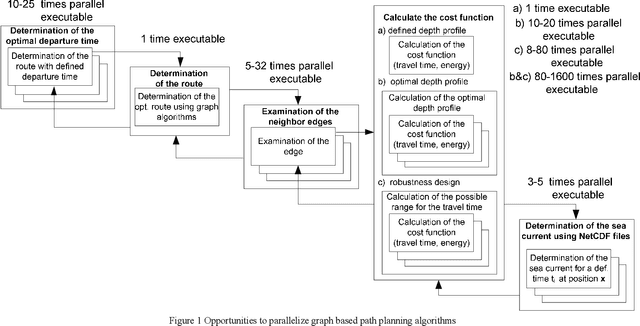
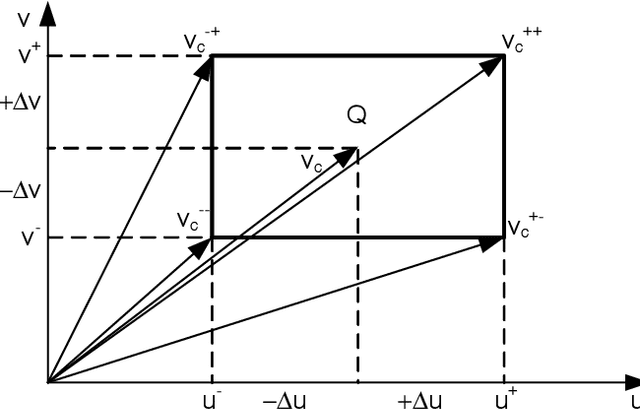
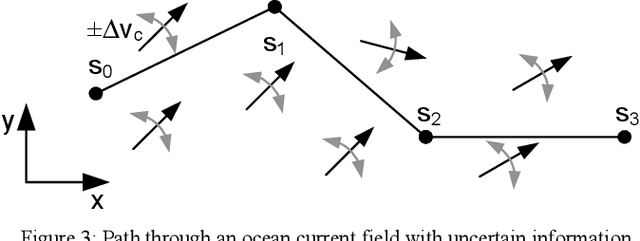
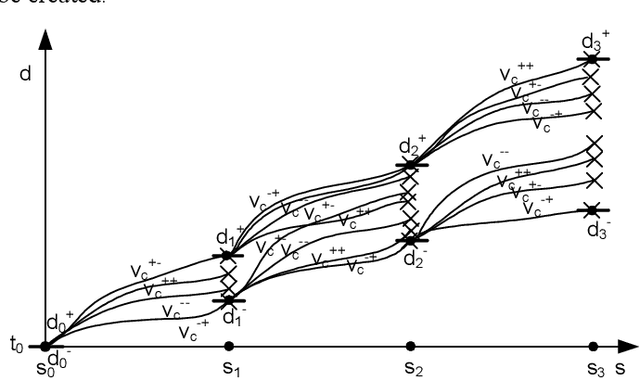
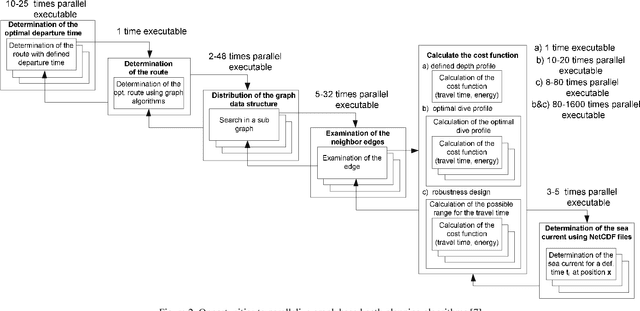
This paper discusses opportunities to parallelize graph based path planning algorithms in a time varying environment. Parallel architectures have become commonplace, requiring algorithm to be parallelized for efficient execution. An additional focal point of this paper is the inclusion of inaccuracies in path planning as a result of forecast error variance, accuracy of calculation in the cost functions and a different observed vehicle speed in the real mission than planned. In this context, robust path planning algorithms will be described. These algorithms are equally applicable to land based, aerial, or underwater mobile autonomous systems. The results presented here provide the basis for a future Research project in which the parallelized algorithms will be evaluated on multi and many core systems such as the dual core ARM Panda board and the 48 core Single-chip Cloud Computer (SCC). Modern multi and many core processors support a wide range of performance vs. energy tradeoffs that can be exploited in energyconstrained environments such as battery operated autonomous underwater vehicles. For this evaluation, the boards will be deployed within the Slocum glider, a commercially available, buoyancy driven autonomous underwater vehicle (AUV).
Modular AUV System for Sea Water Quality Monitoring and Management
Feb 26, 2017



The sustained and cost-effective monitoring of the water quality within European coastal areas is of growing importance in view of the upcoming European marine and maritime directives, i.e. the increased industrial use of the marine environment. Such monitoring needs mechanisms/systems to detect the water quality in a large sea area at different depths in real time. This paper presents a system for the automated detection and analysis of water quality parameters using an autonomous underwater vehicle. The analysis of discharge of nitrate into Norwegian fjords near aqua farms is one of the main application fields of this AUV system. As carrier platform the AUV "CWolf" from the Fraunhofer IOSB-AST will be used, which is perfectly suited through its modular payload concept. The mission Task and the integration of the payload unit which includes the sensor module, the scientific and measurement computer in the AUV carrier platform will be described. Few practice oriented information about the software and interface concept, the function of the several software modules and the test platform with the several test levels to test every module will be discussed.
Parallelization of Path Planning Algorithms for AUVs Concepts, Opportunities, and Program-Technical Implementation
Feb 26, 2017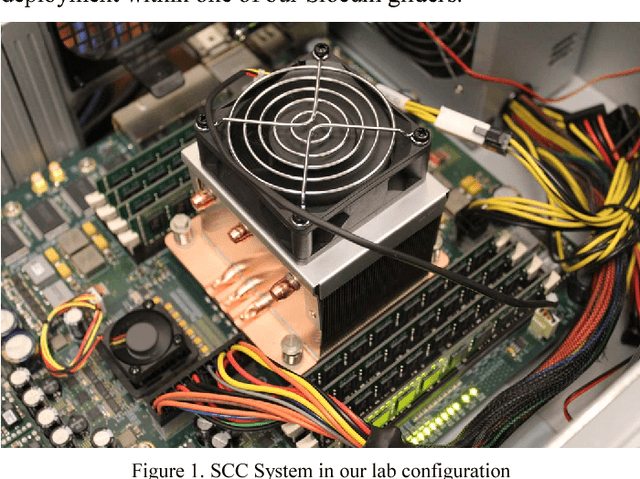

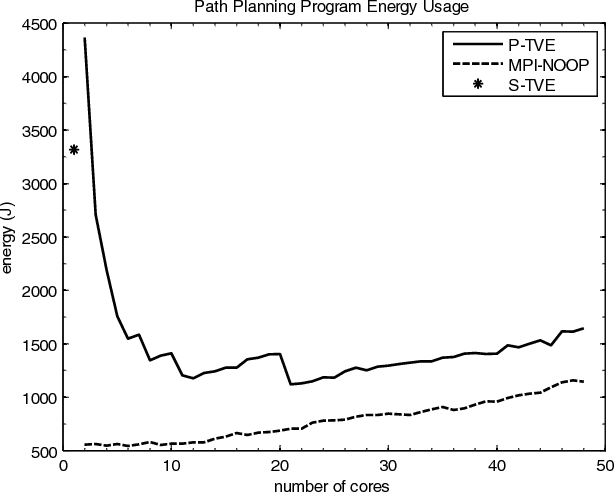
Modern autonomous underwater vehicles (AUVs) have advanced sensing capabilities including sonar, cameras, acoustic communication, and diverse bio-sensors. Instead of just sensing its environment and storing the data for post-Mission inspection, an AUV could use the collected information to gain an understanding of its environment, and based on this understanding autonomously adapt its behavior to enhance the overall effectiveness of its mission. Many such tasks are highly computation intensive. This paper presents the results of a case study that illustrates the effectiveness of an energy-aware, many-core computing architecture to perform on-board path planning within a batteryoperated AUV. A previously published path planning algorithm was ported onto the SCC, an experimental 48 core single-chip system developed by Intel. The performance, power, and energy consumption of the application were measured for different numbers of cores and other system parameters. This case study shows that computation intensive tasks can be executed within an AUV that relies mainly on battery power. Future plans include the deployment and testing of an SCC system within a Teledyne Webb Research Slocum glider.
Comparison of Guidance Modes for the AUV "Slocum Glider" in Time-Varying Ocean Flows
Feb 26, 2017

This paper presents possibilities for the reliable guidance of an AUV "Slocum Glider" in time-varying ocean flows. The presented guidance modes consider the restricted information during a real mission about the actual position and ocean current conditions as well as the available control modes of a glider. A faster-than-real-time, full software stack simulator for the Slocum glider will be described in order to test the developed guidance modes under real mission conditions.