Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuidance of an Autonomous Underwater Vehicle in Special Situations
Paper and Code
Feb 26, 2017
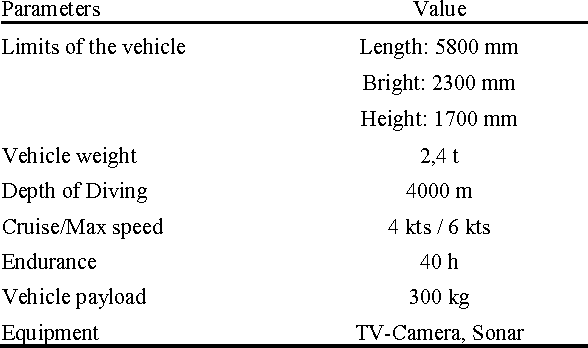
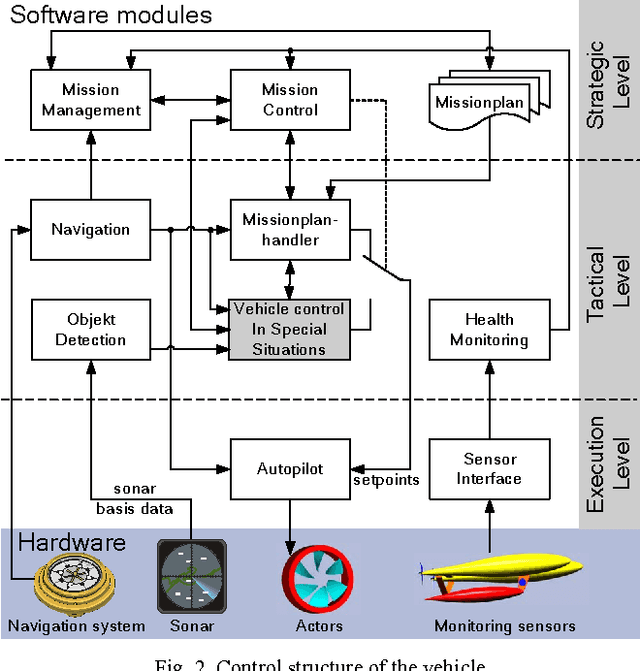
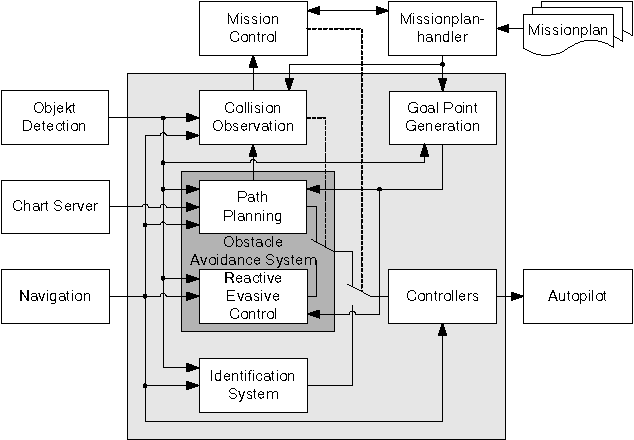
This article describes a guidance system of the autonomous underwater vehicle "DeepC" [1] in Special situations. A special situation occurs when one or more objects interfere with the planned route of a mission. The possible reactions are evasion or identification of the objects. The paper presents these two tasks in overview. The special demands challenges of the underwater environment, computer parameters, sensors and the maneuverability of the vehicle are considered in the selection and development of the required strategies. Such challenges include the sea current, maneuver in the 3-D space and the limited perceptive faculty of the sonar.
* 6 pages, 16 figures, IEEE Oceans 2005 - Europe Brest, 20-23 June 2005
View paper on