 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallelization of Path Planning Algorithms for AUVs Concepts, Opportunities, and Program-Technical Implementation
Feb 26, 2017

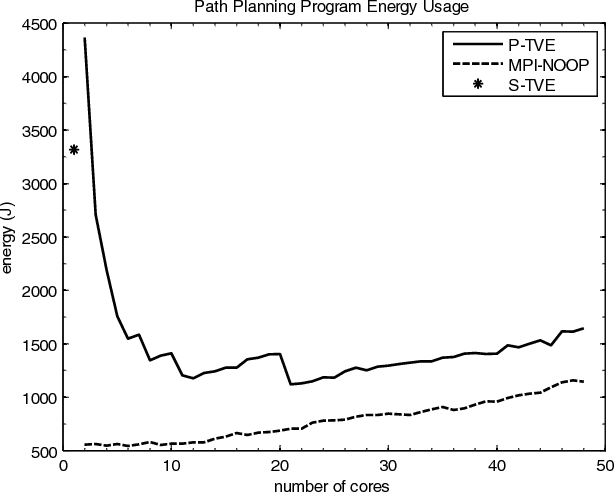
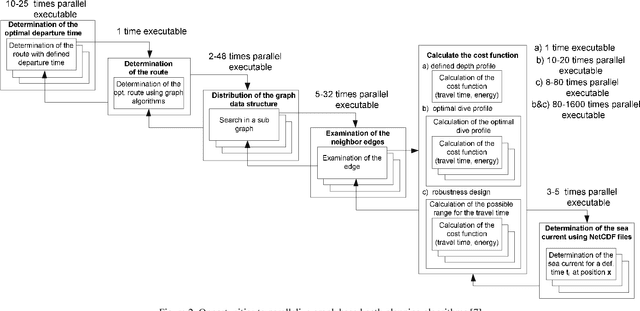
Modern autonomous underwater vehicles (AUVs) have advanced sensing capabilities including sonar, cameras, acoustic communication, and diverse bio-sensors. Instead of just sensing its environment and storing the data for post-Mission inspection, an AUV could use the collected information to gain an understanding of its environment, and based on this understanding autonomously adapt its behavior to enhance the overall effectiveness of its mission. Many such tasks are highly computation intensive. This paper presents the results of a case study that illustrates the effectiveness of an energy-aware, many-core computing architecture to perform on-board path planning within a batteryoperated AUV. A previously published path planning algorithm was ported onto the SCC, an experimental 48 core single-chip system developed by Intel. The performance, power, and energy consumption of the application were measured for different numbers of cores and other system parameters. This case study shows that computation intensive tasks can be executed within an AUV that relies mainly on battery power. Future plans include the deployment and testing of an SCC system within a Teledyne Webb Research Slocum glider.
Comparison of Guidance Modes for the AUV "Slocum Glider" in Time-Varying Ocean Flows
Feb 26, 2017
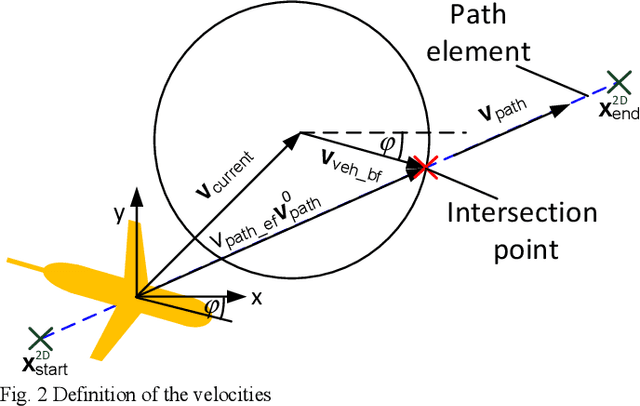

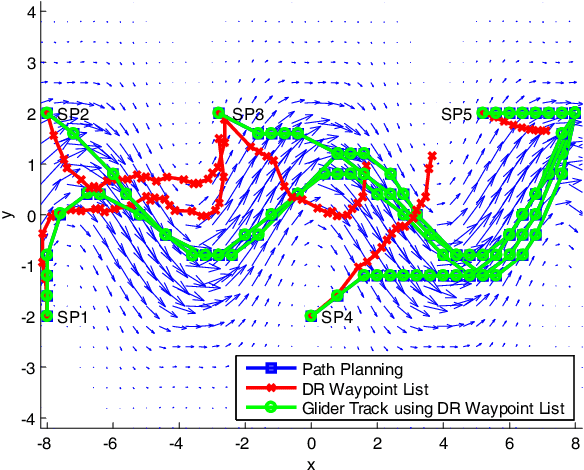
This paper presents possibilities for the reliable guidance of an AUV "Slocum Glider" in time-varying ocean flows. The presented guidance modes consider the restricted information during a real mission about the actual position and ocean current conditions as well as the available control modes of a glider. A faster-than-real-time, full software stack simulator for the Slocum glider will be described in order to test the developed guidance modes under real mission conditions.