Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Concept for an Obstacle Avoidance System for the AUV "SLOCUM Glider" Operation under Ice
Paper and Code
Feb 26, 2017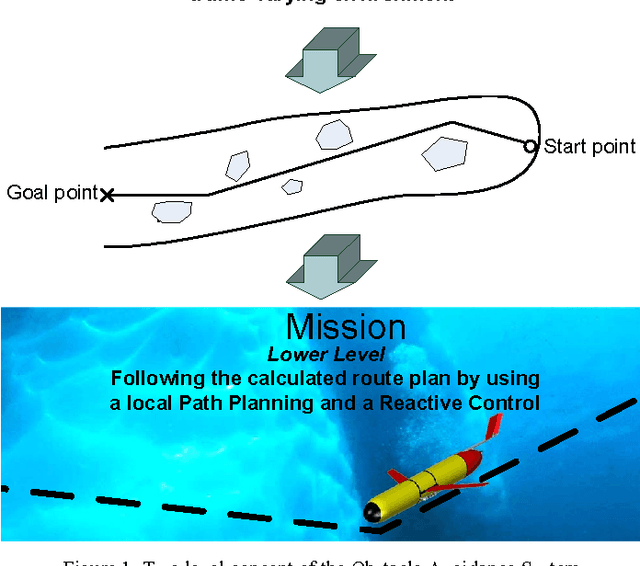
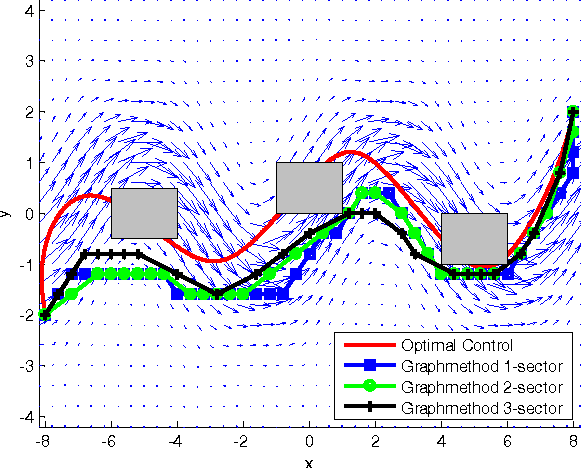
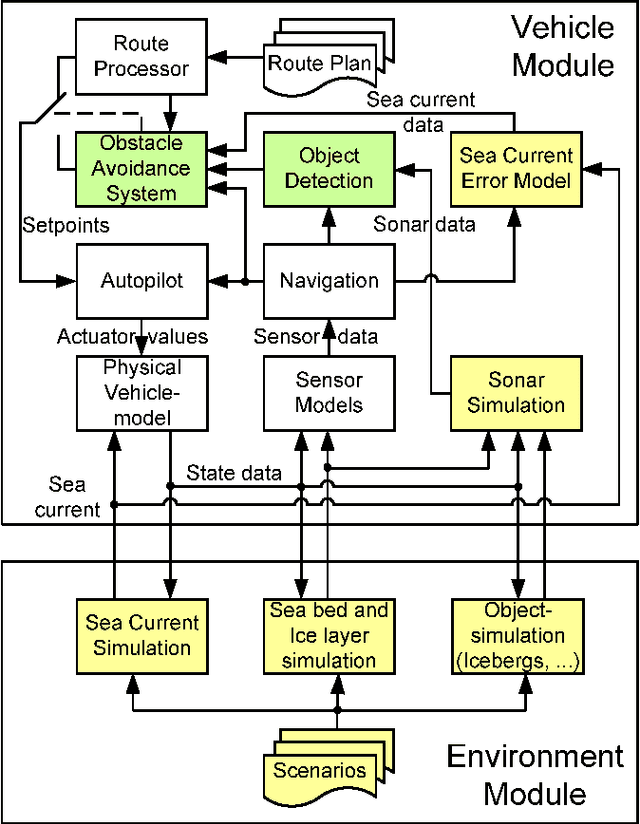
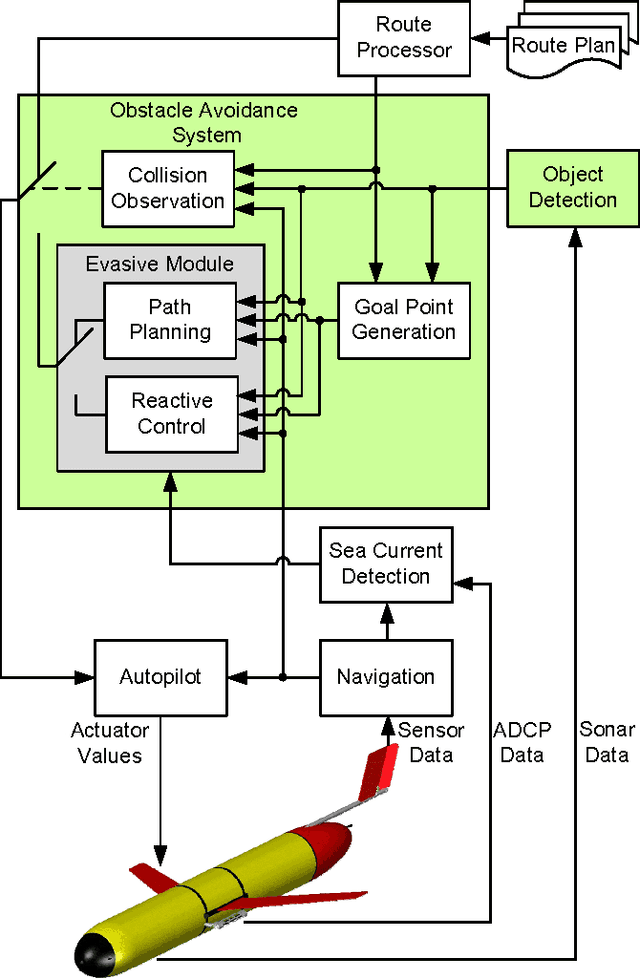
This paper presents a concept for a control System for an autonomous underwater vehicle under ice using a "SLOCUM" underwater glider. The project concept, the separate working tasks for the next one-and-a-half years and the first results will be presented. In this context the structure of the obstacle avoidance system and a simulator structure with a sensor and environment simulation as well as the interfaces to the glider hardware will be discussed. As a first result of the main research, a graph-based algorithm for the path planning in a time-varying environment (variable ocean field, moving obstacles) will be described.
* 8 pages, 10 figures, IEEE OCEANS 2009 - EUROPE Bremen, 11-14 May 2009
View paper on