 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Identification and Controller Parameter Optimization for an Autopilot Design for Autonomous Underwater Vehicles
Jul 10, 2017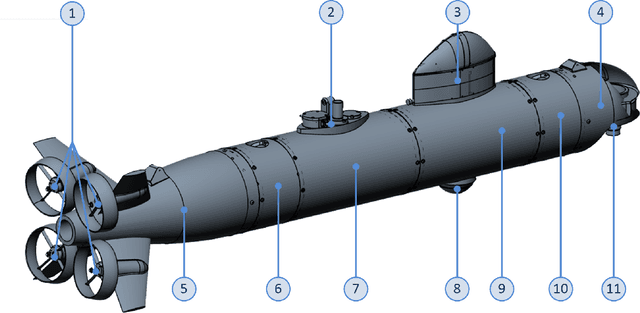
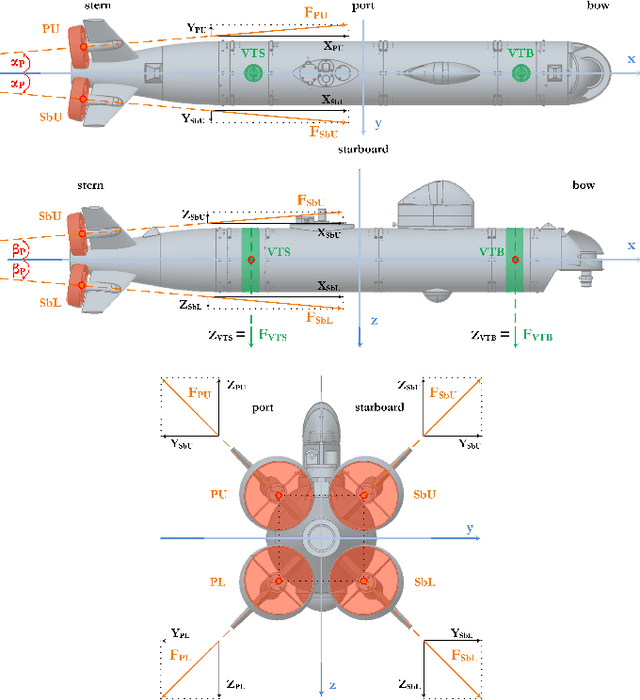
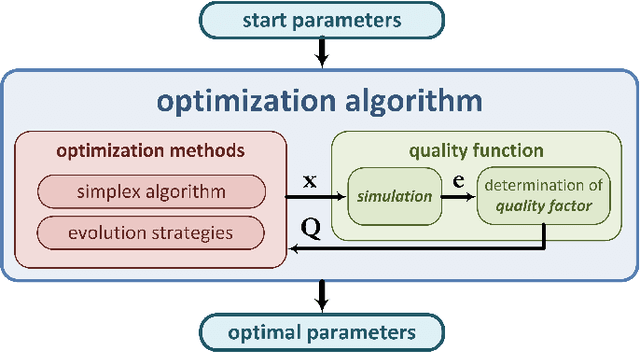
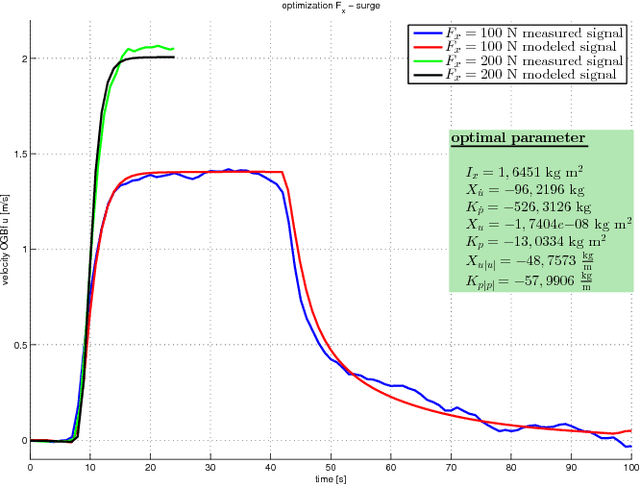
Nowadays an accurate modeling of the system to be controlled is essential for reliable autopilot. This paper presents a non-linear model of the autonomous underwater vehicle 'CWolf'. Matrices and the corresponding coefficients generate a parameterized representation for added mass, Coriolis and centripetal forces, damping, gravity and buoyancy, using the equations of motion, for all six degrees of freedom. The determination of actuator behaviour by surge tests allows the conversion of propeller revolutions to the respective forces and moments. Based on geometric approximations, the coefficients of the model can be specified by optimization algorithms in 'open loop' sea trials. The realistic model is the basis for the subsequent design of the autopilot. The reference variables used in the four decoupled adaptive PID controllers for surge, heading, pitch and heave are provided a 'Line of Sight' - guidance system. A constraint criteria optimization determines the required controller parameters. The verification by 'closed loop' sea trials ensures the results.
Modular AUV System for Sea Water Quality Monitoring and Management
Feb 26, 2017



The sustained and cost-effective monitoring of the water quality within European coastal areas is of growing importance in view of the upcoming European marine and maritime directives, i.e. the increased industrial use of the marine environment. Such monitoring needs mechanisms/systems to detect the water quality in a large sea area at different depths in real time. This paper presents a system for the automated detection and analysis of water quality parameters using an autonomous underwater vehicle. The analysis of discharge of nitrate into Norwegian fjords near aqua farms is one of the main application fields of this AUV system. As carrier platform the AUV "CWolf" from the Fraunhofer IOSB-AST will be used, which is perfectly suited through its modular payload concept. The mission Task and the integration of the payload unit which includes the sensor module, the scientific and measurement computer in the AUV carrier platform will be described. Few practice oriented information about the software and interface concept, the function of the several software modules and the test platform with the several test levels to test every module will be discussed.