 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
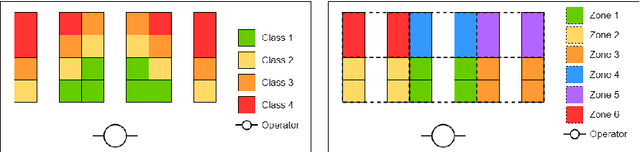
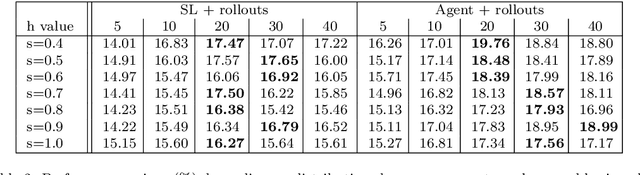
Add to EdgeSupervised learning and tree search for real-time storage allocation in Robotic Mobile Fulfillment Systems
May 31, 2021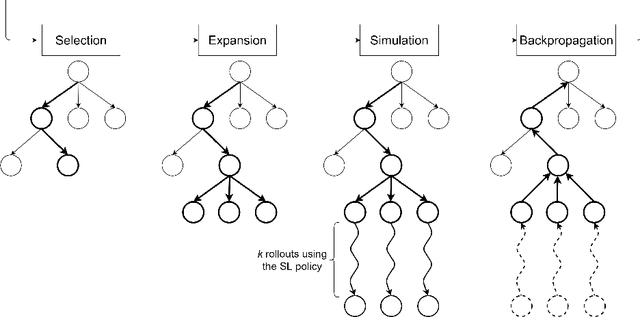
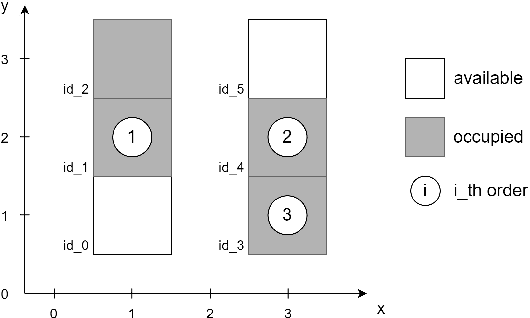
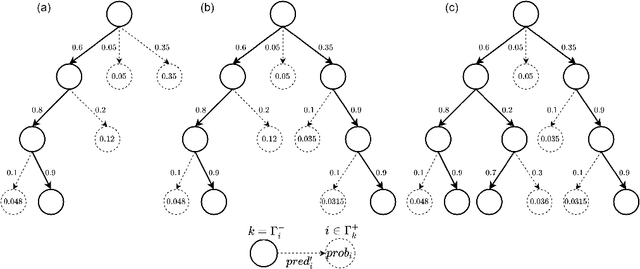
A Robotic Mobile Fulfillment System is a robotised parts-to-picker system that is particularly well-suited for e-commerce warehousing. One distinguishing feature of this type of warehouse is its high storage modularity. Numerous robots are moving shelves simultaneously, and the shelves can be returned to any open location after the picking operation is completed. This work focuses on the real-time storage allocation problem to minimise the travel time of the robots. An efficient -- but computationally costly -- Monte Carlo Tree Search method is used offline to generate high-quality experience. This experience can be learned by a neural network with a proper coordinates-based features representation. The obtained neural network is used as an action predictor in several new storage policies, either as-is or in rollout and supervised tree search strategies. Resulting performance levels depend on the computing time available at a decision step and are consistently better compared to real-time decision rules from the literature.
Semi-Supervised Clustering with Inaccurate Pairwise Annotations
Apr 05, 2021
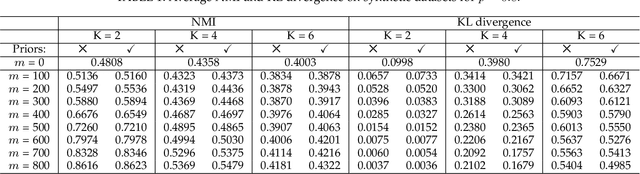

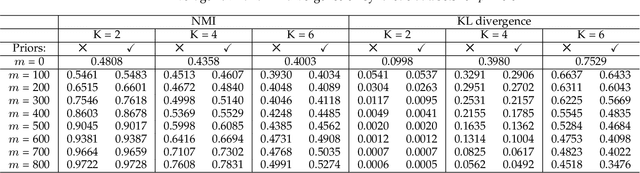
Pairwise relational information is a useful way of providing partial supervision in domains where class labels are difficult to acquire. This work presents a clustering model that incorporates pairwise annotations in the form of must-link and cannot-link relations and considers possible annotation inaccuracies (i.e., a common setting when experts provide pairwise supervision). We propose a generative model that assumes Gaussian-distributed data samples along with must-link and cannot-link relations generated by stochastic block models. We adopt a maximum-likelihood approach and demonstrate that, even when supervision is weak and inaccurate, accounting for relational information significantly improves clustering performance. Relational information also helps to detect meaningful groups in real-world datasets that do not fit the original data-distribution assumptions. Additionally, we extend the model to integrate prior knowledge of experts' accuracy and discuss circumstances in which the use of this knowledge is beneficial.
E-commerce warehousing: learning a storage policy
Jan 21, 2021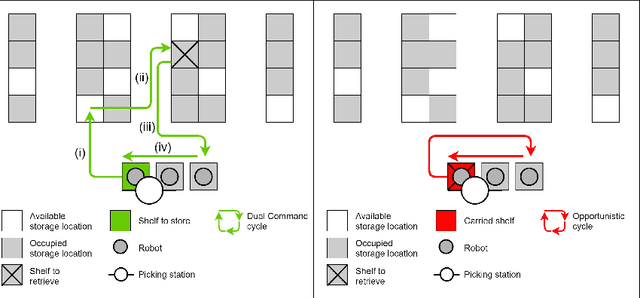
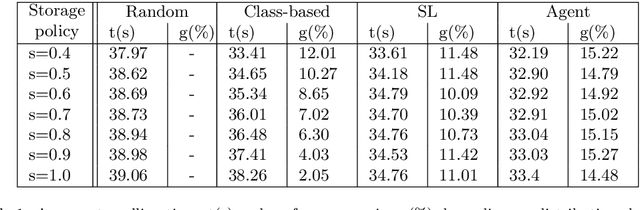
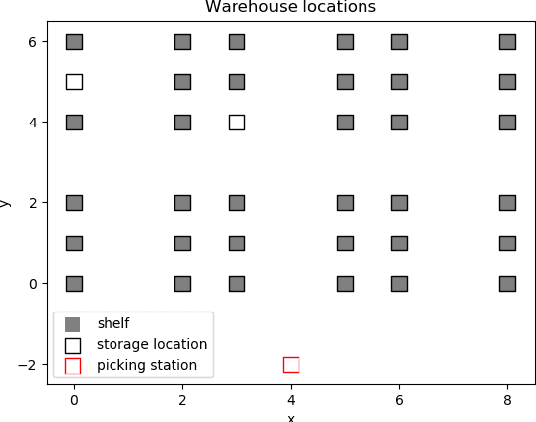
E-commerce with major online retailers is changing the way people consume. The goal of increasing delivery speed while remaining cost-effective poses significant new challenges for supply chains as they race to satisfy the growing and fast-changing demand. In this paper, we consider a warehouse with a Robotic Mobile Fulfillment System (RMFS), in which a fleet of robots stores and retrieves shelves of items and brings them to human pickers. To adapt to changing demand, uncertainty, and differentiated service (e.g., prime vs. regular), one can dynamically modify the storage allocation of a shelf. The objective is to define a dynamic storage policy to minimise the average cycle time used by the robots to fulfil requests. We propose formulating this system as a Partially Observable Markov Decision Process, and using a Deep Q-learning agent from Reinforcement Learning, to learn an efficient real-time storage policy that leverages repeated experiences and insightful forecasts using simulations. Additionally, we develop a rollout strategy to enhance our method by leveraging more information available at a given time step. Using simulations to compare our method to traditional storage rules used in the industry showed preliminary results up to 14\% better in terms of travelling times.
Assortative-Constrained Stochastic Block Models
Apr 21, 2020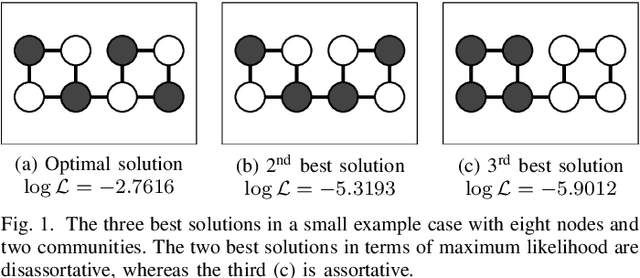
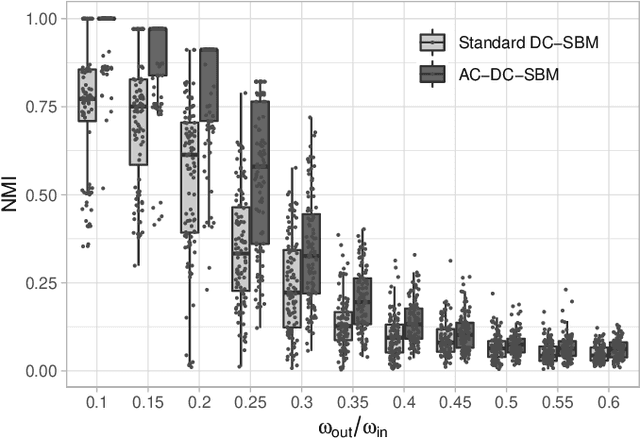

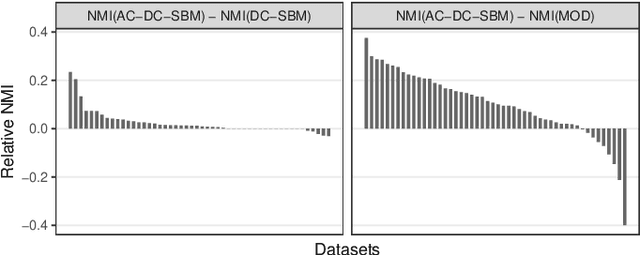
Stochastic block models (SBMs) are often used to find assortative community structures in networks, such that the probability of connections within communities is higher than in between communities. However, classic SBMs are not limited to assortative structures. In this study, we discuss the implications of this model-inherent indifference towards assortativity or disassortativity, and show that this characteristic can lead to undesirable outcomes for networks which are presupposedy assortative but which contain a reduced amount of information. To circumvent this issue, we introduce a constrained SBM that imposes strong assortativity constraints, along with efficient algorithmic approaches to solve it. These constraints significantly boost community recovery capabilities in regimes that are close to the information-theoretic threshold. They also permit to identify structurally-different communities in networks representing cerebral-cortex activity regions.